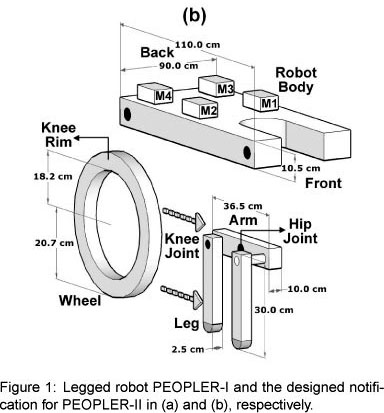
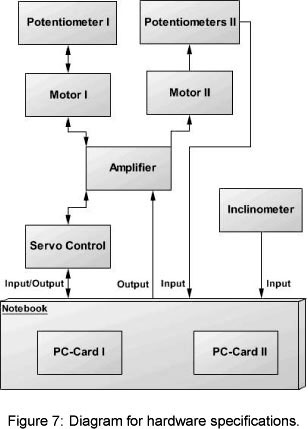
One of the objectives of the paper is to describe the hybrid robot PEOPLER-II (Perpendicularly Oriented Planetary Legged Robot) with regard to switching between leg-type and wheel-type. Our robot has an easier design and control system than other hybrid robots. The software and hardware control in the process of performing five robot tasks are considered. These are the walking, rolling, switching, turning and spinning. In the switching task, we show the control method based on minimization of total energycost. Also, the hardware components and their interconnections are described. The graphical user interfaces utilized in the simulation and experiment are demonstrated. The walking, rolling and the switching without reverse rotation and arm motion are verified in simulation and with real robot, in addition to turning and spinning.
Mobile robots; legged robots; wheeled robots; hybrid robots