RESUMO
Racional:
Nas últimas décadas os simuladores de colangiopancreatografia retrógrada tiveram grande evolução. Atualmente dispõem-se de vários métodos para realizar o treinamento minimizando os riscos de complicações e tornando a curva de aprendizagem muito rápida.
Objetivo:
Demonstrar uma variação dos modelos ex-vivos desenvolvidos para o treinamento avançado em colangiopancreatografia retrograda.
Método:
Foi criado um modelo ex-vivo simulando fatores e condições reais para o treinamento avançado de colangiopancreatografia retrograda como canulação, papilotomia, fistulotomia, papiloplastia e uso de próteses plásticas e metálicas.
Resultados:
Esse modelo ex-vivo, com a possibilidade de troca rápida da papila, mostrou-se viável e no treinamento simula condições muito próximas às reais.
Conclusão:
Neste modelo há grande inovação para o treinamento de novos endoscopistas em procedimento avançados na colangiopancreatografia retrógrada.
DESCRITORES :
Endoscopia; Colangiopancreatografia retrógrada; Próteses biliares.
ABSTRACT
Background:
Models for endoscopic retrograde cholangiopancreatography training allow practice with an expert feedback and without risks. A method to rapidly exchange the papilla can be time saving and accelerate the learning curve.
Aim:
To demonstrate a newly method of rapid exchange papilla in ex-vivo models to teach retrograde cholangiopancreatography advanced procedures.
Methods:
A new model of ex-vivo papilla was developed in order to resemble live conditions of procedures as cannulation, papilotomy or fistula-papilotomy, papiloplasty, biliary dilatation, plastic and metallic stentings.
Results:
The ex-vivo model of papilla rapid exchange is feasible and imitates with realism conditions of retrograde cholangiopancreatography procedures.
Conclusion:
This model allows an innovative method of advanced endoscopic training.
HEADINGS :
Endoscopy; Cholangiography; Choledocholithiasis; Biliary protesis
INTRODUÇÃO
Atualmente existem vários métodos para o treinamento em procedimentos endoscópicos avançados, destacando-se colangiopancreatografia endoscópica retrógrada (CPRE)11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.,44. Matthes K, Cohen J. The Neo-Papilla: a new modification of porcine ex vivo simulators for ERCP training. Gastroint Endosc 2006; 64(4):570-576.. Os principais modelos são: simulador virtual, o uso de porcos vivos e modelos ex-vivo11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.. Esses modelos permitem o treinamento seguro de novos endoscopistas, mesmo estando distante dos grandes centros, sem riscos e sob a supervisão de um especialista experiente.
O objetivo deste trabalho foi demonstrar uma variação dos modelos ex-vivo desenvolvidos para o treinamento avançado da CPRE.
MÉTODOS
Foram criados cinco modelos montados em áreas físicas com estrutura suficiente para acomodar 20 participantes, com no mínimo oito monitores com material endoscópico de uso exclusivo para esse tipo de treinamento e seguindo as orientações da vigilância sanitária em relação ao descarte do material ex-vivo utilizado.
O equipamento utilizado foi o videoduodenoscópio com canal terapêutico e eletrocautério monopolar. Os acessórios utilizados no treinamento foram balão extrator (basket), balão de dilatação de via biliar, papilótomo, fistulótomo, fio guia flexível de 0,035 e próteses metálica e plástica.
O modelo proposto tem como base o trato digestivo suíno (esôfago, estômago duodeno, pâncreas, fígado e vesícula biliar) que é preparado pelo menos 24 h antes do curso e mantido em meio refrigerado.
Criou-se um meio para acomodar a papila artificial (coração de frango) no duodeno suíno. Para isso foi utilizado um pedaço de carne de 600 g, para servir como base para o coração de frango - devidamente anastomosada no duodeno - simulando a cabeça do pâncreas e, devido ao peso, estabilizando as manobras endoscópicas durante o procedimento.
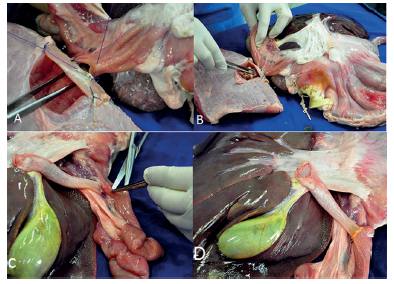
Primeiramente, recobre-se com intestino suíno um pedaço retangular de plástico com uma janela central (Figura 1 - A e B). No pedaço de carne criou-se um sulco retangular com intuito de acomodar o coração de frango (Figura 1C). Nesse local é suturado o pedaço de plástico recoberto (Figura 1D). Para simular a papila duodenal utilizou-se coração de frango (Figura 1E). No ápice dele é feito um pequeno orifício central utilizando-se haste metálica aquecida para simular o orifício papilar e servir como referência para cateterização e papilotomia. Em seguida a nova papila é acomodada no pedaço de carne, com seu ápice voltado para o orifício central do retângulo plástico fixado ao duodeno (Figura 1F). Na segunda porção do duodeno é feita uma pequena incisão de aproximadamente 1 cm, na borda antimesentérica, suturada com a estrutura retangular de plástico (Figura 2A). Após a sutura, a papila artificial é acomodada no modelo pronto (Figura 2B). O segundo modelo serve para realizar o procedimento de retirada de cálculos e introdução de próteses plásticas ou metálicas. Nesse modelo usando um segmento de esôfago do porco, simula-se o colédoco (Figura 2 - C e D). Ambos os modelos são criados uma única vez e no caso do modelo de papila após os procedimentos realizados, apenas troca-se o coração de frango e reiniciam-se as atividades para o próximo participante.
Modelo ex-vivo: A e B) demonstra-se o pedaço retangular de plástico sendo recoberto por segmento de intestino suíno onde a abertura central serve para posicionar o coração de frango ("papila artificial"); C) sulco retangular criado no pedaço de carne para acomodar o coração de frango; D) a janela criada com o pedaço de plástico é fixada na região lateral do pedaço de carne; E) ápice do coração de frango com orifício central; F) visão lateral e a papila artificial posicionada na estrutura retangular do plástico.
A) Janela de 1 cm de diâmetro na segunda porção duodenal sendo suturada na estrutura de plástico retangular; B) modelo com a papila artificial completa; C) um segmento de mucosa/submucosa esofágica imita o colédoco na segunda porção do duodeno; D) segundo modelo (modelo final)
O modelo ex-vivo foi colocado em manequim plástico e o esôfago ligado a um tubo de plástico que foi colocado na boca manequim. O duodenoscópio foi inserido na segunda porção do duodeno e deixado no lugar durante o procedimento.
A papila e o modelo do colédoco foram estruturados e preparados para realizar os seguintes procedimentos ERCP avançados: Modelo 1 para canulação e papilotomia; Modelo 2 para fistulotomia; Modelo 3 para papiloplastia; Modelo 4 para extração de cálculo biliar; e Modelo 5 para implante de stent plástico e metálico.
RESULTADO
Modelo 1 - Canulação e papilotomia.
Nesse modelo o aluno consegue cateterizar usando fio guia e realizar papilotomia. Após o término do procedimento troca-se o coração de frango quantas vezes necessitar (Figura 3 - A e B).
- A) Imagem demonstrando aluno realizando a papilotomia; B) imagem endoscópica da papilotomia
Modelo 2 - Fistulotomia
Nessa estação o participante realiza a fistulotomia usando o needle knife. O procedimento é realizado com orientação de um instrutor experiente (Figura 4).
Modelo 3 - Papiloplastia
Nessa estação o estudante utiliza um balão dilatador, realiza a papiloplastia aumentando o diâmetro da papila. Depois desse procedimento, troca-se o coração de frango para um novo estudante realizar o mesmo procedimento (Figura 5).
Imagem endoscópica demonstrando a dilatação transpapilar e a aparência ao término da papiloplastia balonada
Modelo 4 - Extração de cálculo na via biliar
Para esse procedimento usa-se o segundo modelo proposto (colédoco artificial). No terço médio desse "colédoco" cria-se uma estenose artificial com pedaço de elástico. Nesse modelo o aluno pode realizar a dilatação biliar com balão e em seguida realizar a extração do cálculo com balão extrator (grãos de café).
Modelo 5 - Próteses de plástico ou metal.
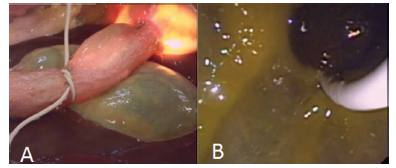
Nessa estação, o participante usa o fio guia flexível e prótese de plástico e metal para drenagem da via biliar. Para esse procedimento pode-se usar qualquer um dos modelos. No caso de usar modelo com papila, além de realizar passagem de próteses, antes pode ser realizada a cateterização, papilotomia, fistulotomia ou papiloplastia. (Figura 7 - A, B, C, D).
- A) Imagem demonstrando a constrição externa representada por tira elástica; B) imagem demonstrando o "cálculo" sendo retirado com balão extrator
- A e B) Imagens demonstrando próteses de plástico; C e D) imagens demonstrando próteses de metal
DISCUSSÃO
Para se tornar apto ao procedimento terapêutico de CPRE, o endoscopista necessita desenvolver vários alicerces: interpretação da imagem radioscópica, avaliação clínica e habilidade técnica. Neste contexto o uso de simuladores é um atrativo para o ensino devido ao risco nulo de complicações e a possibilidade de ter especialista ensinando e guiando o aluno11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.,44. Matthes K, Cohen J. The Neo-Papilla: a new modification of porcine ex vivo simulators for ERCP training. Gastroint Endosc 2006; 64(4):570-576.. Ha três principais modelos de ensino: realidade virtual, porcos vivos e modelos ex-vivo.
O primeiro é muito caro e não possui realismo; além disso, o método virtual perde o objetivo didático após 20-50 procedimentos, portanto se demonstra como ferramenta eficaz para treinamento básico.
O modelo animal oferece maior realismo, porém além de dispendioso necessita de infraestrutura adequada e várias questões éticas geram empecilhos. Junto a isso, a anatomia desfavorável da papila duodenal e ducto pancreático suíno dificultam seu uso para essa finalidade11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.,44. Matthes K, Cohen J. The Neo-Papilla: a new modification of porcine ex vivo simulators for ERCP training. Gastroint Endosc 2006; 64(4):570-576.,55. Parra Blanco A, Gonzales. N, Gonzales.R, Ortiz-fernandez-sordo.J, Ordieres.C: Animals models for endoscopic training do we really need them? Endoscopy. 2013 Jun;45(6):478-84..
Por fim, o modelo ex-vivo apesar de ser criado de modo artesanal e laboratorialmente, possui várias vantagens como o realismo, facilidade de uso e reprodução, custo baixo comparado aos anteriores e não há preocupações éticas. Conforme os artigos de Artifon et al11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.,22. Artifon EL, Tchekmedvian AJ, Fernandes K, Artifon AN, F. Endoscopy training by using ex vivo and simulators: a new teaching tool. Rev Gastroenterol Peru. 2014 Oct-Dec;34(4):325-31. esse tipo de modelo é viável e impactante para o ensino de larga escala e com qualidade didática.
Alguns modelos suínos ex-vivo usam a papila nativa, mas têm algumas limitações: o pequeno tamanho da papila, a sua localização, bem como a impossibilidade de fazer várias esfincterotomias no mesmo modelo11. Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41..
Devido a essas dificuldades para ensino através de uso animais vivos e simuladores, houve a necessidade de criar novos modelos ex-vivo, usando-se coração de frango para simular uma papila duodenal, bem como procedimentos endobiliares e transpapilares55. Parra Blanco A, Gonzales. N, Gonzales.R, Ortiz-fernandez-sordo.J, Ordieres.C: Animals models for endoscopic training do we really need them? Endoscopy. 2013 Jun;45(6):478-84.,66. Rustemovic N, D`Assunção MA, Bilic B, et al. A simple ex vivo, biologic ERCP training model for sphincterotomy. Endoscopy 2015; 47:E401-E403.,77. Velázquez-Aviña J, Sobrino-Cossío S, Chávez-Vargas C et al. Development of a novel and simple ex vivo biologic ERCP training model. Gastrointest Endosc 2014; 80: 1161-1167.. Entretanto, os primeiros modelos propostos tomavam muito tempo para serem estruturados, devido à necessidade do coração ser suturado na parede do estômago suíno66. Rustemovic N, D`Assunção MA, Bilic B, et al. A simple ex vivo, biologic ERCP training model for sphincterotomy. Endoscopy 2015; 47:E401-E403.. Este modelo, proposto por Matthes44. Matthes K, Cohen J. The Neo-Papilla: a new modification of porcine ex vivo simulators for ERCP training. Gastroint Endosc 2006; 64(4):570-576., demorava aproximadamente 75 min para ser finalizado; nesse contexto, o modelo ora apresentado tem marcante vantagem: a fácil reprodução do método e a papila duodenal pode ser trocada em questão de segundos.
CONCLUSÃO
O modelo ex-vivo é viável e possui robustas vantagens, destacando-se o valor agregado, a facilidade de reprodução, realismo e rotatividade do aluno de modo eficaz, possibilitando o ensino avançado e em larga escala.
REFERENCES
-
1Artifon ELA, Ramierez ME, Ardengh JC, et al. Ex vivo and simulator models teaching therapeutic ERCP and EUS. Rev Gastroenterol Peru. 2016;36(3):231-41.
-
2Artifon EL, Tchekmedvian AJ, Fernandes K, Artifon AN, F. Endoscopy training by using ex vivo and simulators: a new teaching tool. Rev Gastroenterol Peru. 2014 Oct-Dec;34(4):325-31.
-
3Desilets DJ Banerjee S Barth BA, Kaul V, Kethu SR, Pedrosa MC, Endoscopic simulator gastrointestinal endoscopy. 2011 73 (5) 861-867.
-
4Matthes K, Cohen J. The Neo-Papilla: a new modification of porcine ex vivo simulators for ERCP training. Gastroint Endosc 2006; 64(4):570-576.
-
5Parra Blanco A, Gonzales. N, Gonzales.R, Ortiz-fernandez-sordo.J, Ordieres.C: Animals models for endoscopic training do we really need them? Endoscopy. 2013 Jun;45(6):478-84.
-
6Rustemovic N, D`Assunção MA, Bilic B, et al. A simple ex vivo, biologic ERCP training model for sphincterotomy. Endoscopy 2015; 47:E401-E403.
-
7Velázquez-Aviña J, Sobrino-Cossío S, Chávez-Vargas C et al. Development of a novel and simple ex vivo biologic ERCP training model. Gastrointest Endosc 2014; 80: 1161-1167.
Datas de Publicação
-
Publicação nesta coleção
Nov-Dec 2016
Histórico
-
Recebido
25 Jan 2016 -
Aceito
12 Maio 2016