Resumo
Este artigo apresenta uma análise de um sistema técnico, formado pela integração de um sistema de captura de movimentos com um software de modelagem e simulação humana, visando estabelecer formas de utilização no processo de projetos contextualizados pela ergonomia. Foram analisadas diferentes configurações das principais etapas do processo de integração através de ensaios experimentais e definidos quatro ensaios com delineamento fatorial para testar a combinação das diferentes configurações possíveis do sistema: i) posicionamento espacial de ambientes virtuais; ii) mitigação de erros (drift); iii) cinemática do manequim digital; e iv) compatibilidade antropométrica. Os resultados orientam como configurar um sistema integrado para posicionar o ambiente virtual, permitindo a correção do posicionamento. Também foram criados procedimentos que relacionam as interações possíveis entre o corpo de captura e o ambiente de trabalho com as características da atividade e os objetivos da simulação. Além disso, foi elaborada uma sistemática iterativa para compatibilizar a antropometria entre o ser humano real, o modelo humano do sistema de captura e o manequim digital do software de simulação humana. Os procedimentos operacionais elaborados mostram diferentes possibilidades de uso, formas de reduzir e equacionar as limitações e problemas de utilização de manequins digitais integrados com sistemas de captura de movimentos. O desenvolvimento de formas de uso dessas tecnologias representa uma melhoria das técnicas utilizadas para construção de simulações, contribuindo para inserção da perspectiva da atividade futura no projeto de novas situações produtivas.
Palavras-chave:
Ergonomia; Modelagem de ambientes virtuais; Manequins digitais; Sistemas de captura de movimentos
Abstract
This study presents an analysis of a technical system consisting of the integration of a motion capture system with a human modeling and simulation software aiming to propose ways to use it in the design processes contextualized by ergonomics. Different configurations of the main stages of the integration process are analyzed through experimental tests. Four factorial experiments were conducted to test the possible combinations of the different configurations of the system: i) spatial positioning of virtual environments; ii) drift mitigation; iii) kinematics of the digital human model; and iv) anthropometric compatibility. The results obtained demonstrate how to configure the integrated system towards the positioning of the virtual environment, enabling position correction. Procedures relating the possible interactions between the motion capture body and the work environment with the activity characteristics and the simulation goals were developed. In addition, an iterative systematics was created to match the anthropometry among the real human individual, the human model of the motion capture system, and the digital human model of the simulation software. The operating procedures proposed show the different ways to use the integrated system and the ways to reduce and overcome the limitations and problems arising from the use of digital human models integrated with motion capture systems. Finding ways to use these technologies represents an improvement of the commonly used simulation techniques, contributing to the insertion of future work activity into the design of new productive situations.
Keywords:
Ergonomics; Virtual environment modeling; Digital human models; Motion capture systems
1 Introdução
A ergonomia atua desenvolvendo conhecimentos e apoiando análises e projetos de produtos e de situações produtivas. Na perspectiva da ergonomia situada, considerar a atividade significa que não são levadas em conta as funções gerais (como posturas e movimentos) de forma isolada, mas sim os comportamentos e gestos, tais como se apresentam naturalmente nas situações particulares de trabalho, existentes ou em concepção.
Nesse contexto, Daniellou (2007)Daniellou, F. (2007). A ergonomia na condução de projetos de concepção de sistemas de trabalho. In P. Falzon (Ed.), Ergonomia (Cap. 21, pp. 303-315). São Paulo: Blucher. propõe a análise de situações de referência e simulação da atividade futura para inserção eficaz da ergonomia no processo de concepção. Pode-se extrapolar a simulação humana como um ferramental útil para ampliar o espaço de interação entre diferentes atores no processo de projeto, buscando uma construção social.
O processo de construção social busca, dentre outros aspectos, colocar o ponto de vista do trabalho como fator principal na confrontação das diferentes lógicas dos atores (ergonomistas, projetistas, operadores, gerentes e diretores) que utilizam conhecimentos e questionamentos que possam apresentar similaridade com a situação em concepção e serem utilizadas no processo de projeto (situações de referência).
O projeto também incomporta outra vertente, a construção técnica, que no tocante à ergonomia inclui a busca de ferramentas e soluções operacionais para realizar as simulações das situações de referência identificadas e analisadas. Os resultados da simulação são prognósticos relativos ao trabalho futuro.
Para tanto, a simulação humana foi introduzida na indústria como ferramenta para facilitar processos de projetos, acelerando seu desenvolvimento e eficiência em custos (Lämkull et al., 2009Lämkull, D., Hanson, L., & Örtengren, R. (2009). A comparative study of digital human modelling simulation results and their outcomes in reality: a case study within manual assembly of automobiles. International Journal of Industrial Ergonomics, 39(2), 428-441. http://dx.doi.org/10.1016/j.ergon.2008.10.005.
http://dx.doi.org/10.1016/j.ergon.2008.1...
). Diversos autores posicionam a ferramenta como uma forma de integrar e analisar aspectos de ergonomia possivelmente presentes na atividade futura de trabalho em fases iniciais da concepção (Braatz et al., 2012Braatz, D., Menegon, N. L., Fontes, A. R. M., & Tonin, L. A. (2012). Simulação humana digital na concepção de postos de trabalho: estudo comparativo de casos. Gestão & Produção, 19(1), 79-92. http://dx.doi.org/10.1590/S0104-530X2012000100006.
http://dx.doi.org/10.1590/S0104-530X2012...
; Kang et al., 2012Kang, B., Lee, D., Chung, M., Kyung, G., & Nam, K. (2012). A method to create dynamic motions of digital human models and a case study. In Proceedings of the 56th Human Factors and Ergonomics Society (pp. 2542-2546). Boston: SAGE. http://dx.doi.org/10.1177/1071181312561528.
http://dx.doi.org/10.1177/10711813125615...
; Magistris et al., 2013Magistris, G., Micaelli, A., Evrard, P., Andriot, C., Savin, J., Gaudez, C., & Marsot, J. (2013). Dynamic control of DHM for ergonomic assessments. International Journal of Industrial Ergonomics, 43(2), 170-180. http://dx.doi.org/10.1016/j.ergon.2013.01.003.
http://dx.doi.org/10.1016/j.ergon.2013.0...
).
A principal funcionalidade na simulação humana é o posicionamento de modelos humanos digitais nas posturas de trabalho assumidas pelos operadores (Ziolek & Kruithof, 2000Ziolek, S. A., & Kruithof, P. C. J. (2000). Human modeling & simulation: a primer for practioners. In Proceedings of the 44th HFES (pp. 825-827). San Diego: HFES. http://dx.doi.org/10.1177/154193120004403839.
http://dx.doi.org/10.1177/15419312000440...
). Normalmente, a postura de trabalho definida na simulação é uma representação do trabalho futuro que o usuário do software possui, mas que não comporta a complexidade da atividade futura (Braatz et al., 2012Braatz, D., Menegon, N. L., Fontes, A. R. M., & Tonin, L. A. (2012). Simulação humana digital na concepção de postos de trabalho: estudo comparativo de casos. Gestão & Produção, 19(1), 79-92. http://dx.doi.org/10.1590/S0104-530X2012000100006.
http://dx.doi.org/10.1590/S0104-530X2012...
; Zülch, 2012Zülch, G. (2012). Features and limitations of digital human models: a new German guideline. Work: A Journal of Prevention, Assessment and Rehabilitation, 41(Supl 1), 2253-2259. PMid:22317050.). Outro desafio da simulação humana tradicional é a dificuldade operacional no posicionamento dos manequins digitais de forma manual, utilizando-se “mouse e teclado” (Sundin & Örtengren, 2006Sundin, A., & Örtengren, R. (2006). Digital human modeling for CAE applications. In G. Salvendy (Ed.), Handbook of human factors and ergonomics (pp. 1053-1078). New Jersey: John e Wiley & Sons.; Menegon et al., 2011Menegon, N. L., Braatz, D., & Tonin, L. (2011). Simulação humana. In F. Másculo & M. Vidal. Ergonomia: trabalho adequado e eficiente (pp. 365-393). Rio de Janeiro: Elsevier/ABEPRO.).
Para auxiliar na superação dos problemas da simulação humana tradicional podem ser utilizados os Motion Capture Systems (MoCap) ou Sistemas de Captura de Movimentos, que permitem capturar os movimentos humanos reais, editar e reproduzir em ferramentas computacionais através de manequins digitais.
A utilização desses sistemas ainda apresenta uma série de desafios, principalmente em situações não controladas como, por exemplo, ambientes de produção. As condições das operações e do ambiente de trabalho, como iluminação, temperatura, calor e materiais podem causar desvios no resultado das capturas.
Dessa forma, neste artigo é analisado o processo técnico de integração de um sistema de MoCap com ferramental de modelagem e simulação humana digital. Para isso, foram realizados ensaios fatoriais com as diferentes configurações da integração dessas tecnologias, visando a construção de cenários virtuais que possibilitem incorporar aspectos da atividade futura na concepção de situações de trabalho.
2 Modelagem e simulação humana em ergonomia
Os ambientes virtuais de simulação humana são definidos pela relação entre cenário, manequim digital e análises (Ziolek & Kruithof, 2000Ziolek, S. A., & Kruithof, P. C. J. (2000). Human modeling & simulation: a primer for practioners. In Proceedings of the 44th HFES (pp. 825-827). San Diego: HFES. http://dx.doi.org/10.1177/154193120004403839.
http://dx.doi.org/10.1177/15419312000440...
), conforme articulação apresentada na Figura 1.

Processo de simulação. Fonte: adaptado de Ziolek & Kruithof (2000)Ziolek, S. A., & Kruithof, P. C. J. (2000). Human modeling & simulation: a primer for practioners. In Proceedings of the 44th HFES (pp. 825-827). San Diego: HFES. http://dx.doi.org/10.1177/154193120004403839.
http://dx.doi.org/10.1177/15419312000440... .
O ambiente virtual representa a situação produtiva em concepção em termos de materiais, equipamentos e processos. Esses são construídos em sistemas CAD (Computer Aided Design) a partir da definição de aspectos de engenharia que estabelecem os requisitos e dimensões da situação produtiva.
O manequim digital é modelado representando o homem no trabalho, com suas dimensões antropométricas e biomecânicas. As análises representam as interações do manequim digital com o ambiente virtual, no qual o modelo humano é posicionado no seu local de trabalho e tem as posturas reproduzidas. Neste momento podem ser avaliados aspectos de ergonomia relacionados com as variáveis de projeto (antropometria, condições de acesso, espaço, zonas e envelopes de alcance, campo visual, entre outros). Também podem ser realizadas avaliações quantitativas, utilizando-se protocolos como RULA, NIOSH, OWAS, Snook e Ciriello, entre outros.
O processo de modelagem e simulação humana pode ser construído basicamente de duas formas: estática ou dinâmica. As simulações estáticas são desenvolvidas com o cenário e o manequim digital em instantes específicos. Nessa forma, são modelados somente os cenários e posturas considerados importantes para a situação produtiva em projeto, “discretizando” e simplificando o curso da ação. Já na simulação dinâmica busca-se representar os movimentos do operador durante a realização das tarefas, possibilitando a compreenção do encadeamento da ação em termos de cenário, posturas e interações. Nesse formato também ocorre, em menor nível, “discretização” e simplificação, o que é atenuado pela interpolação entre as interações.
Ambas as formas de simular o trabalho futuro podem ser construídas manualmente (“mouse e teclado”) ou com apoio de sistemas de MoCap. Em geral, a construção manual exige esforço operacional maior, podendo conduzir a uma representação mais simplificada da situação de projeto. O uso de capturas auxilia a elaboração de uma representação menos simplificada, aproximando a simulação da perspectiva da atividade. A Figura 2 ilustra capturas em ambiente real, a integração com MoCap e com os Modelos Digitais Humanos (MDH) em ambiente virtual.

3 Sistemas de captura de movimentos
Os sistemas de MoCap podem ser classificados conforme a tecnologia utilizada na concepção de seus sensores (Silva, 1997Silva, F. W. S. (1997). Motion Capture: introdução à tecnologia. Rio de Janeiro: Laboratório de Computação Gráfica, COPPE/UFRJ.): eletromecânicos, magnéticos, ópticos, markerless e inercial. Cada tipo de sensor estabelece necessidades e restrições para o ambiente no qual será realizada a captura dos movimentos, definindo assim o processo de obtenção dos movimentos e as necessidades de calibração. Santos et al. (2014)Santos, W., Tonin, L. A., Brratz, T., Wu, R. L., & Menegon, N. L. (2014). Avaliação de tecnologias de captura de movimentos em projetos de situações produtivas. In Anais do 17º ABERGO. Rio de Janeiro: ABERGO., em uma pesquisa com as cinco tecnologias, analisaram liberdade de movimentos durante a captura, flexibilidade no ambiente de uso e integração com três ferramentas de modelagem e simulação humana. Os resultados mostraram que todos os sistemas analisados apresentaram limitações quanto aos critérios estabelecidos, sendo que a tecnologia inercial foi a que melhor atendeu a todos os critérios. Com base nisso, a tecnologia inercial é considerada objeto de estudo.
Esses sensores são compostos de acelerômetros e giroscópios. Os acelerômetros são empregados para determinar a velocidade e a posição do objeto capturado em relação a um determinado ponto referencial relativo, sendo comum a utilização da Terra como referência. Já os giroscópios são utilizados para definir o ângulo e orientação dos objetos (Carvalho, 2011Carvalho, A. G. (2011). Influência da modelagem dos componentes de bias instabilidade dos sensores inerciais no desempenho do navegador integrado SNI/GPS (Dissertação de mestrado). Instituto Militar de Engenharia, Rio de Janeiro.). Tais equipamentos são determinantes para o posicionamento espacial em ambiente virtual e para a movimentação do manequim digital (cinemática).
Os sensores inerciais estão sujeitos a desvios (denominados drift) que diminuem a qualidade da captura realizada. Esse erro é composto por imprecisões do fator de escala, desalinhamento e ruído, que evoluem com o tempo de captura e são intrínsecos ao processo (Carvalho, 2011Carvalho, A. G. (2011). Influência da modelagem dos componentes de bias instabilidade dos sensores inerciais no desempenho do navegador integrado SNI/GPS (Dissertação de mestrado). Instituto Militar de Engenharia, Rio de Janeiro.). Nos modelos mais modernos desse tipo de sensor também são utilizados magnetômetros para reduzir esses erros. Porém surgem outros problemas, relacionados com a presença de objetos metálicos no ambiente, que causam perturbações no campo magnético local, causando erros na orientação estimada (Roetenberg, 2006Roetenberg, D. (2006). Inertial and magnetic sensing of human motion (Tese de doutorado). Universidade de Twente, Alemanha, Enschede.). Para resolver esses problemas, Roetenberg (2006)Roetenberg, D. (2006). Inertial and magnetic sensing of human motion (Tese de doutorado). Universidade de Twente, Alemanha, Enschede. propõe a utilização de um algorítmico matemático, o filtro de Kalman, que integra os sinais de giroscópio, acelerômetro e magnetômetro para mitigar os erros.
Outra forma de reduzir os erros de captura é utilizar a técnica de truncar (zerar) a velocidade do acelerômetro em certos momentos, ao longo do período de captura (Young, 2010Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM.). Para isso é necessário conhecer os instantes nos quais o objeto capturado está em contato com algum elemento no ambiente real, como parede, escada, piso e móveis (chamado Método do Ponto de Contato).
A Figura 3 ilustra uma razão típica para a aplicação do Método do Ponto de Contato proposto por Young (2010)Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM. durante a movimentação de um humano. O manequim em cinza (linha tracejada) representa a posição das pernas, obtida pelo sensor inercial, e o manequim em preto (linha contínua), a posição real das pernas. Ao iniciar a movimentação (transição de A para B), os sensores inerciais já acumulam erro, desviando o humano capturado de sua posição real. É possível observar o efeito cumulativo do erro durante toda a movimentação (C, D e E). A aplicação do Método do Ponto de Contato considera os instantes em que o pé do humano real está em contato com o piso para ajustar a captura e mitigar o desvio.

Exemplo de erros gerados e acumulados durante captura. Fonte: adaptado de Young (2010)Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM..
Por fim, outro desafio nesse contexto reside na compatibilidade antropométrica entre o objeto capturado (manequim real) e os MDH utilizados nos softwares, tanto do aplicativo do sistema de MoCap quanto do software de simulação humana. Cada um desses manequins possui diferentes medidas antropométricas e funcionamento biomecânico. Para a compreensão dos efeitos desses problemas e redução das limitações apontadas realizou-se um conjunto de experimentos, descritos a seguir.
4 Aspectos metodológicos
A pesquisa possui característica experimental de interferência, pois visa estabelecer relações de “causa e efeito” entre variáveis independentes e dependentes (Baptista & Campos, 2010Baptista, M. N., & Campos, D. C. (2010). Metodologia de pesquisa em ciências: análises quantitativa e qualitativa. 2. ed. Rio de Janeiro: LTC.). As variáveis independentes são as configurações existentes no processo de integração das tecnologias e as variáveis dependentes, os resultados das diferentes combinações de configuração que formam os problemas e limitações de utilização do sistema.
4.1 Caracterização do sistema integrado
Para realização dos ensaios foi proposto um sistema integrado composto por duas diferentes tecnologias computacionais: (i) o sistema de MoCap Moven, que utiliza sensores inerciais; e (ii) o software CAD Delmia, que possui um módulo de modelagem e simulação humana digital, o Human Builder.
Para possibilitar a incorporação dos movimentos capturados com o Moven no modelo digital humano do Human Builder é necessário a utilização de um plugin, o RTI. Preliminarmente, o sistema foi explorado para se compreender o processo de integração e suas possibilidades de configuração. As três tecnologias computacionais (incluindo o RTI) permitem a definição de parâmetros que influenciam no resultado do processo.
O Moven possui cinco etapas de configuração que devem ser realizadas antes de se iniciar a gravação dos movimentos capturados. A primeira etapa é a fixação dos sensores inerciais, centrais de processamento de dados e ligação dos cabos no manequim real.
A segunda etapa é a definição do cenário, que influencia na cinemática a ser desenvolvida pelo manequim digital. As possibilidades consideram variáveis relacionadas ao piso do ambiente e à pélvis do manequim.
A terceira etapa consiste na definição do modo de utilização dos magnetômetros, que serão utilizados durante a captura para diminuir os efeitos do drift. Existem três modos: i) o modo Kinematic Coupling Algorithm (KiC), que ignora os dados dos magnetômetros localizados nos sensores fixados nos membros inferiores quando o manequim real está em movimentação e volta a utilizá-los quando o manequim real está em repouso; ii) o modo KiC sem os magnetômetros, que desativa o uso desses durante todo o período de captura; e, iii) o modo XKF-3, que utiliza os magnetômetros e o filtro de Kalman.
Na quarta etapa são definidas as medidas antropométricas do manequim digital do aplicativo do sistema do Moven (avatar). Um avatar é definido por Badler (1997Badler, N. (1997). Virtual humans for animation, ergonomics, and simulation. Philadelphia: University of Pennsylvania., p. 6) como um “[...] humano virtual controlado por um participante vivo”. No contexto desta pesquisa, o avatar é manequim do software do sistema de MoCap, cujos movimentos são controlados pelo manequim real (participante vivo).
A quinta etapa é a calibração do avatar em relação ao modelo humano real. O objetivo da calibração é alinhar o sistema de coordenadas dos sensores inerciais com os segmentos corporais do humano real e determinar a distância relativa entre as articulações de ambos modelos biomecânicos (Roetenberg et al., 2013Roetenberg, D., Luinge, H., & Slycke, P. (2013). Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. The Netherlands: Xsens.). Nessa etapa também é realizada a calibração do cenário de captura, que influencia na direção de movimentação do avatar. Finalizadas essas cinco etapas pode-se iniciar a gravação da captura.
A segunda tecnologia que integra o método é o software CAD Delmia. Nele é necessário criar o MDH e personalizar suas medidas antropométricas.
A última etapa de configuração é a determinação da origem dos dados capturados no aplicativo do Moven em relação à origem desses dados no cenário virtual do Delmia. Existem duas possibilidades: a primeira é utilizar o manequim do Human Builder como base para receber os dados provenientes da gravação, a segunda é utilizar uma geometria (denominada carpete mágico) que permite transladar o ponto de origem dos dados capturados para um ponto específico no carpete.
4.2 Delineamento experimental
A integração proposta possibilitou diferentes configurações (combinações possíveis) dos elementos do sistema técnico. Com isso foram elaborados quatro ensaios experimentais envolvendo as parametrizações nas diferentes etapas do processo de integração e os problemas de pesquisa observados. Os experimentos são apresentados no Quadro 1.
Os ensaios foram realizados em um laboratório de pesquisa localizado em uma universidade. O prédio, que possui um piso térreo e um pavimento superior, foi modelado no Delmia para se obter o ambiente virtual. Para cada ensaio foram definidos diferentes procedimentos de preparação, técnica de coleta de dados e análise dos resultados.
4.2.1 Ensaio 1: Posicionamento espacial de ambiente virtual
O piso do laboratório foi explorado buscando-se um ponto onde não havia efeito de campos magnéticos que pudessem intervir no processo de calibração. Para isso, os sensores foram montados e foi realizada uma exploração prévia do térreo. O ponto encontrado foi definido como o local de realização da calibração, estabelecendo a origem e o sistema de coordenadas no aplicativo do Moven.
Essa origem foi demarcada no piso e um eixo de coordenadas (x, y) foi criado como referência para a movimentação do manequim real. Esse sistema de coordenadas foi denominado Sistema de Coordenadas Real (R).
Esse mesmo ponto foi modelado no ambiente virtual através da medição das distâncias em relação às paredes do fundo e laterais do prédio. Foram modeladas duas linhas guias, traçadas cortando o eixo coordenado, estabelecendo o Sistema de Coordenadas Virtual (V).
Com essa preparação foram realizadas duas capturas de movimentos, verificando-se o resultado sem a calibração do cenário (V1A) e com a calibração do cenário (V1B). Tais capturas consistiram na movimentação do manequim real linearmente no sistema R traçado no piso, até se atingir os pontos de referência com o pé direito.
Essas duas capturas foram integradas com o Delmia separadamente, variando-se as configurações de posicionamento/origem dos dados de captura: configuração padrão (V1C), manequim como base (V1D) e carpete mágico (V1E).
Os resultados foram analisados comparando-se origem, direção e sentido de movimentação do manequim real nos três sistemas de coordenadas (sistema Moven, sistema R e sistema V). Para eliminar o efeito do drift com o tempo, para cada conjunto de variáveis os sensores foram reinicializados e a calibração, previamente salva, recarregada.
4.2.2 Ensaio 2: Mitigação do drift
Com a definição dos procedimentos para posicionamento espacial do ambiente virtual foram analisados o efeito das configurações envolvidas com os erros do sistema de MoCap. Esse procedimento experimental consistiu nas seguintes etapas:
-
•
Realização da captura de movimentos com cada um dos três modos de utilização dos magnetômetros (V2A, V2B e V2C). Os movimentos realizados com cada configuração compreenderam: desenvolver um trajeto previamente definido com algumas ações, como sentar-se em uma cadeira, pular uma caixa e andar entre obstáculos. Cada percurso foi iniciado e finalizado na origem do sistema de coordenadas, completando-se uma volta (circuito completo). Com cada configuração foram realizadas sete voltas, que variaram de 1,2 a 1,5 minutos, totalizando tempo de captura de aproximadamente 10 minutos;
-
•
Tratamento dos dados capturados (V2D), aplicando-se a técnica proposta por Young (2010)Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM.. A cada configuração dos magnetômetros foi corrigida a posição do manequim digital no instante em que completou cada volta, isto é, quando o manequim real estava posicionado na origem do sistema R;
-
•
Repetição do experimento, reinicializando-se os sensores a cada volta (V2E) no momento em que o manequim real estava posicionado na origem do sistema R.
Os resultados foram obtidos através da medida do desvio da posição do manequim real em relação à posição do MDH. A cada volta realizada pelo manequim real foi salva a posição do manequim Human Builder no ambiente virtual. A medida do drift foi estabelecida como a distância entre o ponto que definia a origem do sistema V e o ponto de referência do MDH em cada volta.
Os dados foram analisados calculando-se o erro total acumulado ao longo das sete voltas para cada configuração dos magnetômetros, com o tratamento dos dados capturados e com a reinicialização dos sensores.
4.2.3 Ensaio 3: Cinemática do manequim digital
Nesse ensaio foi avaliado o efeito das configurações de cenário Padrão (V3A), Piso flexível (V3B), Pélvis fixa (V3C), Pélvis fixa rígida (V3D) e Múltiplos níveis (V3E) na cinemática do manequim digital do Human Builder. Os procedimentos para realização desse ensaio foram:
-
•
Preparação do ambiente físico e virtual: Na origem do sistema R foi construído um aparato ortogonal aos eixos x e y. Esse mesmo aparato foi modelado no Delmia e posicionado na origem do sistema V, sendo denominado linhas de referência dos movimentos do ambiente real com o ambiente virtual;
-
•
Definição de um roteiro padrão de movimentação: Foram definidos tipos de movimentos característicos para serem realizados pelo manequim real durante a captura – realizando movimentos em pé (andando), sentando (movimentando as pernas) e em escada (subindo e descendo degraus). Esses movimentos característicos foram mantidos em todas as configurações de cenário;
-
•
Obtenção de dados de captura: Foram realizadas capturas com o manequim real reproduzindo os movimentos definidos no roteiro para cada configuração do cenário (total de 15 arquivos de captura);
-
•
Verificação no ambiente virtual: Integração das capturas realizadas com manequim virtual Human Builder dentro do ambiente virtual modelado.
Os resultados foram analisados comparando-se, para cada configuração de cenário, a movimentação do manequim real com os movimentos resultantes reproduzidos pelo Human Builder no ambiente virtual, em relação às linhas de referência de movimentação.
4.2.4 Ensaio 4: Compatibilidade antropométrica
Nesse ensaio foi avaliado o efeito dos modelos antropométricos do Moven e do Human Builder, para proporcionar compatibilidade entre as medidas antropométricas do humano real e as do manequim digital do Human Builder. Para realizar a comparação entre os modelos antropométricos foi definido um protocolo com as dimensões corporais funcionais apresentadas por Panero & Zelnik (2002)Panero, J., & Zelnik, M. (2002). Dimensionamento humano para espaços interiores: um livro de consulta e referência para projetos. Barcelona: Gustavo Gili. 320 p.. Essas dimensões são posturas típicas de trabalho, com posições de alcance dos membros superiores e inferiores.
O Moven possui dois modelos antropométricos. O primeiro, denominado “simplificado” (V4A), possui apenas duas medidas antropométricas: altura e tamanho do pé. As outras dimensões corporais são geradas automaticamente. Já o segundo modelo, denominado “detalhado” (V4B), possui oito medidas antropométricas: altura, tamanho do pé, envergadura, altura do quadril, altura até o joelho, altura do maléolo, largura do quadril e largura do ombro, além de necessitar também da espessura da sola do sapato do manequim real.
O modelo antropométrico do Human Builder permite personalizar até 103 medidas antropométricas. Porém só há correspondência com seis medidas do Moven: altura, tamanho do pé, envergadura, altura do quadril, altura do joelho e altura do maléolo.
Como existem grandes diferenças entre os modelos antropométricos do Moven e do Human Builder, foram estabelecidos três níveis de customização antropométrica para o Human Builder. No primeiro nível, chamado Human Simplificado (V4C), são personalizadas duas medidas antropométricas (as mesmas do modelo simplificado do sistema do Moven). No segundo nível, denominado Human Intermediário (V4D), são personalizadas seis medidas antropométricas, que existem no Human Builder e que possuem correspondência com o modelo antropométrico detalhado do Moven. Por fim, no último nível foi criado um manequim Human Detalhado (V4E), que possui as seis medidas correspondentes ao modelo antropométrico detalhado do Moven mais cinco medidas: altura do acrômio sentado, comprimento nádega-joelho sentado, comprimento antebraço-mão sentado, comprimento parede-pulso e alcance até a ponta do polegar. Essas medidas não estão diretamente relacionadas com os modelos antropométricos do Moven, mas influenciam nas dimensões dos membros superiores e inferiores do Human Builder e, consequentemente, possuem potencial para influenciar o resultado das medidas das posturas corporais funcionais do protocolo definido.
Além disso, os testes preliminares mostraram que não seria possível utilizar o mesmo valor numérico para as medidas antropométricas correspondentes devido às diferenças na arquitetura lógica de construção dos modelos biomecânicos do Moven e do Human Builder.
As medidas antropométricas para os modelos do Moven foram obtidas conforme as orientações do manual do software (Xsens, 2012Xsens. (2012). Moven: user manual. Moven Motion Capture System. The Netherlands: Xsens Technologies B.V.), com o auxílio do sistema de MoCap óptico Qualysis (Qualisys Motion Capture System) e do software Visual 3D. Já as medidas antropométricas para os modelos do Human Buider foram realizadas utilizando-se uma trena graduada.
Como o Moven não realiza captura dos movimentos das mãos e o protocolo possui posturas que exigem apreensão, o modelo humano real segurou um pedaço de tubo plástico de 1,5 polegada de diâmetro para simular tal efeito. Ao mesmo tempo, esse tubo foi modelado no Delmia e posicionado de forma que o MDH também pudesse segurá-lo. Com essa preparação foi possível realizar a coleta dos dados:
-
•
Criação dos modelos antropométricos do Moven: simplificado (V4A) e detalhado (V4B);
-
•
Captura de movimentos: Foram realizadas duas capturas de movimentos, cada uma utilizando um modelo antropométrico (simplificado e detalhado), aplicando-se o protocolo com as dimensões corporais funcionais;
-
•
Geração de posturas: A captura realizada no sistema Moven foi integrada no Delmia e foram gerados dois catálogos com as posturas do protocolo;
-
•
Criação de MDH no Human Builder: Foram criados os três manequins digitais Human simplificado (V4C), Human intermediário (V4D) e Human detalhado (V4E).
Os resultados foram analisados comparando-se quantitativamente as diferenças entre as dimensões corporais funcionais do modelo humano real com as dimensões corporais funcionais dos três níveis de detalhamento dos manequins digitais do Human Builder no ambiente virtual.
Os resultados obtidos nos ensaios conduziram a proposição de uma rotina de procedimentos operacionais para utilização do sistema integrado.
5 Resultados e discussão
5.1 Posicionamento espacial de ambientes virtuais
Esse ensaio envolveu as seguintes variáveis do sistema de captura e do plugin RTI:
-
•
V1A: Quando o cenário não foi calibrado, a movimentação do avatar do Moven foi realizada no sistema de coordenadas referenciado pela Terra;
-
•
V1B: Quando o cenário foi calibrado, a movimentação ocorreu em sistema de coordenadas criado pelo aplicativo do sistema de MoCap;
-
•
V1C: A configuração padrão do plugin RTI gerou os dados de captura na origem do sistema de coordenadas da área de trabalho do Delmia;
-
•
V1D: A utilização do manequim como base gerou os dados de captura no ponto referencial em que estava posicionado o manequim digital Human Builder;
-
•
V1E: A utilização do carpete mágico fez com que os dados de captura fossem posicionados conforme ponto referencial de modelagem do carpete.
Dessa forma, para possibilitar o posicionamento espacial de um ambiente virtual na mesma posição e direção de um ambiente físico real são necessárias duas condições ao sistema V: (i) que sua origem seja sobreposta à origem do sistema R; e, (ii) que o eixo x possua mesma direção e sentido que o sistema R.
A calibração do cenário gera movimentos do avatar do Moven em sistema de coordenadas local e definido. Quando essa configuração é combinada com a opção utilização do manequim como base, resulta que o sistema de coordenadas do Moven torna-se compatível com o sistema do Delmia. Porém esse conjunto de configurações exige que o ambiente seja livre de materiais ferromagnéticos, que podem causar perturbações no campo magnético, impedindo que a calibração seja realizada adequadamente. Nesse tipo de ambiente a melhor estratégia é realizar a calibração do Moven e do cenário em um local que não possui interferência de materiais ferromagnéticos, para posteriormente realizar a captura no ambiente agressivo ao sistema. Para a integração com o Delmia, recomenda-se utilizar o carpete mágico para transladar a origem dos dados do Moven para o local desejado, posicionando a geometria com a sua origem respeitando os sentidos do sistema de coordenadas em que foi realizada a captura. Os procedimentos operacionais para posicionamento espacial de ambientes virtuais são apresentados no Quadro 2.
Com a definição dos procedimentos adequados para posicionamento espacial foi possível realizar o ensaio de mitigação dos desvios de captura (drift).
5.2 Mitigação do drift
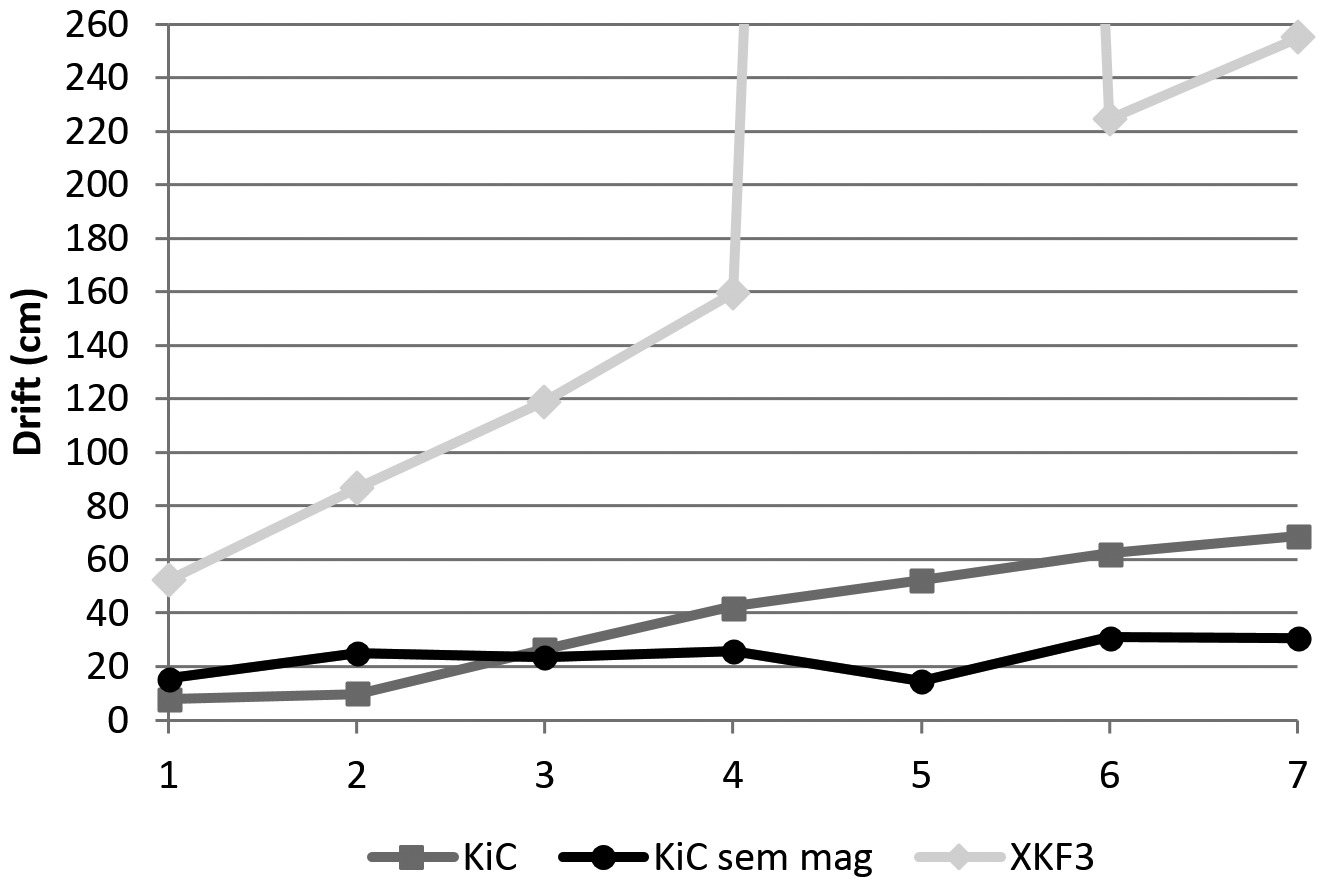
Em todos os delineamentos ensaiados, os modos de configuração dos magnetômetros apresentaram drift elevado (V2A, V2B e V2C), conforme pode ser observado na Figura 4. Em geral, o menor drift foi obtido quando não foram utilizados os magnetômetros (V2B) durante a captura. Esse modo de configuração apresentou tendência de estabilidade dos erros a cada volta. O modo KiC (V2A) teve comportamento com menor drift nas duas primeiras voltas, mas manteve tendência de aumento à medida que avançou o tempo de captura. Já o modo que utiliza o filtro de Kalman – XKF3 (V2C) – apresentou maior drift em todas as voltas, em comparação com os outros dois modos. É importante observar que, durante a volta 5, esse modo apresentou um pico com erro de mais de 1,8 metro (180 cm). Esse comportamento atípico pode ter sido causado por algum problema de transmissão dos dados durante a captura. Dessa forma, os resultados obtidos nessa volta foram excluídos para os três modos dos magnetômetros, para possibilitar análise comparativa.

Foi possível melhorar os dados capturados pelo processo de truncamento da aceleração do giroscópio, conforme apresentado por Young (2010)Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM., porém não sendo possível eliminá-lo completamente. Com o tratamento dos dados capturados (V2D) aplicado a todos os modos dos magnetômetros ocorreu redução dos erros de drift. Considerado o erro acumulado durante as seis voltas, as três opções disponíveis para utilização dos magnetômetros apresentaram melhoria de 28%, 52% e 67% para KiC, KiC sem magnetômetros e XKF3, respectivamente, como ilustrado na Figura 5.

Os resultados com a reinicialização dos sensores (V2E), a cada volta, para todos os modos dos magnetômetros foram semelhantes aos erros obtidos com o tratamento dos dados, porém ao se realizar esse procedimento também ocorreu a reinicialização do sistema de coordenadas do aplicativo do Moven, fazendo o avatar perder a referência do seu próprio sistema de coordenadas. Isso impediu a realização de capturas de movimentos considerando todo o curso de ação do operador.
As informações obtidas sugerem que os melhores resultados em termos de diminuição dos erros de posicionamento (drift) são obtidos quando os magnetômetros estão desligados durante todo tempo de captura. Além disso, todos os modos dos magnetômetros apresentaram redução dos erros quando foi realizado o tratamento dos dados de captura. Contudo, é importante ressaltar que para realização desse tratamento é necessário o conhecimento das coordenadas (x, y, z) do humano real, que devem ser inseridas no aplicativo de captura para correção do posicionamento. Esse procedimento somente é possível pelo posicionamento espacial de um ambiente virtual, conforme realizado no Ensaio 1.
Com a planta do local em ambiente CAD foi possível conhecer as coordenadas (x, y, z) que o humano real assumiu no ambiente real. Dessa forma definiram-se os procedimentos para mitigação do drift que se relacionam com a configuração dos magnetômetros e com o posicionamento de ambientes virtuais descritos a seguir:
-
•
Utilizar o modo com os magnetômetros desligados (Moven);
-
•
Criar um ambiente virtual posicionado em relação ao ambiente real (Ensaio 1);
-
•
Estabelecer pontos (x, y, z) para corrigir o posicionamento;
-
•
Tratar os dados de captura utilizando os pontos determinados para correção do posicionamento (Moven).
5.3 Cinemática do manequim digital
Os resultados do ensaio de cinemática do manequim digital mostraram que cada cenário escolhido definiu um ponto de referência que permaneceu fixo no avatar do aplicativo do Moven durante todo o período de captura. Esse mesmo ponto permaneceu fixo no manequim digital do Human Builder quando a captura foi integrada com o Delmia. Comparando-se os diferentes tipos de cenários com os tipos de movimentos realizados no ensaio, pode-se determinar o ponto fixo do avatar do Moven de cada tipo de cenário e as implicações para movimentação do Human Builder, conforme o Quadro 3.
Dessa forma, a escolha do cenário adequado depende das características da atividade de trabalho e dos objetivos pretendidos para a simulação. Para determinar a relação entre as características da atividade e os objetivos da simulação foram criadas quatro tipos de interações:
-
i
Interações somente no plano horizontal: andar, pegar objetos, manusear ferramentas, carregamento de cargas;
-
ii
Interações somente em posição sentada: trabalho em equipamentos em posição sentada, dirigir, pilotar;
-
iii
Interações no plano horizontal e vertical: subir escadas, gabaritos, plataformas e outros;
-
iv
Interações mistas: compostas por trabalhar em posição sentada e também deslocamentos (horizontais e/ou verticais).
Para cada tipo de interação desejada foi criado um procedimento operacional, conforme apresentado no Quadro 4.
5.4 Compatibilidade antropométrica
Os resultados do ensaio de compatibilidade antropométrica mostraram que, apesar das diferenças na arquitetura lógica de funcionamento dos modelos antropométricos do Moven e do Human Builder, é possível adequar a antropometria entre os manequins do sistema integrado com certo nível de erro.
Na Tabela 1 são apresentados os desvios relativos percentuais entre os valores do humano real e os valores obtidos no ambiente virtual do Moven e do Human Builder, para as dimensões corporais funcionais do protocolo de posturas utilizado. É possível observar que, com o detalhamento dos MDH foram obtidos menores desvios relativos totais, chegando-se a um valor de 11,3% de desvio em relação a seis posturas. Porém os valores elevados de desvio padrão relativos evidenciam comportamento aleatório para o processo de compatibilidade antropométrica de modelagem difícil.
A importância da compatibilidade antropométrica dos manequins do sistema está na aplicação de princípios antropométricos, conforme destacado por Menegon et al. (2002)Menegon, N. L., Braatz, D., Secchin, V. M. S., Regazzini, M. L. L., La Salvia, A. B. N., Pereira, W. A., Naveiro, D. M., Zamberlan, M. C. P. L., & Pastura, F. C. H. (2002). Pesquisa Antropométrica Embraer. In Anais do 12º ABERGO. Rio de Janeiro: ABERGO.. Nesses princípios é estabelecido que devem ser definidas variáveis importantes de projeto relacionadas com o processo de trabalho (por exemplo, os alcances com os membros superiores, alcances com membros inferiores ou acessos a determinado local) e respeitadas as medidas relacionadas com os extremos da população (percentil 5 ou percentil 95, dependendo da situação de trabalho). Assim será garantido que 90% da população conseguirá alcançar ou acessar determinado local.
Dessa forma, os resultados do ensaio de compatibilidade antropométrica sugerem que deve ser realizado um processo iterativo de compatibilidade, baseado nas variáveis definidas para o projeto em questão (onde será aplicada a técnica de captura). Com essas variáveis é necessário definir um protocolo de posturas que possua dimensões antropométricas diretamente correspondentes com as variáveis ou que possam ser medidas indiretamente.
Os valores das medidas obtidas para as posturas do protocolo são utilizados como base de comparação com os valores obtidos para o manequim Human Builder. Assim, recomenda-se utilizar o modelo antropométrico detalhado do Moven com o modelo detalhado do Human Builder para se iniciar o processo iterativo. Caso o resultado inicial não seja satisfatório, deve-se aumentar a quantidade de medidas antropométricas até que se obtenha um resultado adequado.
A compatibilidade entre os modelos antropométricos do sistema integrado representa um grande desafio para sua utilização em análises precisas e refinadas dos movimentos. Este problema está pautado em três aspectos. O primeiro envolve especificamente o sistema de captura Moven, que não realiza a captura dos movimentos das mãos. Isso impossibilita a obtenção de movimentos precisos em atividades manuais. Já o segundo está na diferença entre os modelos biomecânicos e antropométricos dos manequins do sistema. O modelo humano real possui mais de 200 articulações e inúmeras possibilidades de medidas antropométricas. Esse modelo real é representado no ambiente virtual do Delmia pelo manequim digital Human Builder, que possui no máximo 103 medidas antropométricas e uma estrutura formada por 50 segmentos articulados. A integração desses dois modelos é “intermediada” pelo avatar do Moven que possui, no máximo, 9 medidas antropométricas e 22 articulações. Além disso, devem ser observados os graus de liberdade dos modelos biomecânicos computacionais. Apesar do Human Builer não possuir um modelo estruturado com articulações, os movimentos permitidos para cada segmento buscam respeitar o funcionamento do corpo humano. Em compensação, todas as articulações do modelo biomecânico do Moven possuem 3 graus de liberdade, o que não representa a realidade humana. Esses fatos mostram uma redução da complexidade de representação humana que dificulta a compatibilidade. Por fim, o terceiro aspecto está relacionado com a dificuldade operacional na obtenção das medidas antropométricas, que demandam diferentes técnicas e métodos (Menegon et al., 2002Menegon, N. L., Braatz, D., Secchin, V. M. S., Regazzini, M. L. L., La Salvia, A. B. N., Pereira, W. A., Naveiro, D. M., Zamberlan, M. C. P. L., & Pastura, F. C. H. (2002). Pesquisa Antropométrica Embraer. In Anais do 12º ABERGO. Rio de Janeiro: ABERGO.). Esse fato ficou evidenciado na obtenção das medidas tanto para os modelos antropométricos virtuais Moven e Human Builder quanto para as dimensões corporais funcionais do protocolo de Panero & Zelnik (2002)Panero, J., & Zelnik, M. (2002). Dimensionamento humano para espaços interiores: um livro de consulta e referência para projetos. Barcelona: Gustavo Gili. 320 p..
6 Conclusões
Neste artigo foram propostos procedimentos operacionais para o uso integrado de um sistema de captura de movimentos em cenários virtuais interligado com um software CAD que inclui manequins digitais. Considerando o processo técnico de criação de ambientes virtuais de modelagem e simulação humana apresentado por Ziolek & Kruithof (2000)Ziolek, S. A., & Kruithof, P. C. J. (2000). Human modeling & simulation: a primer for practioners. In Proceedings of the 44th HFES (pp. 825-827). San Diego: HFES. http://dx.doi.org/10.1177/154193120004403839.
http://dx.doi.org/10.1177/15419312000440...
, o sistema integrado contribui em dois aspectos relevantes: o primeiro relacionado com a presença simultânea de manequins digitais juntamente com um sistema CAD, no qual os ambientes (geometrias) são modelados e podem ser editados no mesmo ambiente. Esse fato facilita a criação da simulação humana, pois não são necessários processos de exportação e importação de geometrias, como para outros simuladores presentes no mercado. O segundo aspecto está relacionado com a criação das interações (análises). A utilização de um sistema integrado permite capturar movimentos reais realizados pelos trabalhadores ou usuários e posicioná-los no ambiente virtual, referenciando o local real de trabalho ou uso, contribuindo para redução do tempo de criação desse tipo de análise e para a melhoria dos erros de construção postural e posicionamento associado ao método “mouse e teclado”.
Além dos aspectos técnicos, o uso integrado desses sistemas pode auxiliar o processo social (Daniellou, 2007Daniellou, F. (2007). A ergonomia na condução de projetos de concepção de sistemas de trabalho. In P. Falzon (Ed.), Ergonomia (Cap. 21, pp. 303-315). São Paulo: Blucher.) caracterizado por espaços de discussão e construção de consensos, nos quais são confrontados os diferentes mundos-objeto dos atores sociais. Os cenários de simulação criados pelos ergonomistas buscam representar uma proposta da futura situação de trabalho, que deve ser desenvolvida, discutida e validada na presença dos participantes do projeto. As simulações humanas criadas utilizando sistemas de captura de movimentos têm a vantagem de possibilitar movimentos mais realistas e contextualizados em relação à técnica tradicional. Além disso, a integração com o sistema CAD possibilita uma melhor compreensão dos erros e dos limites inerentes às capturas, contribuindo para utilização de cenários (compostos pelo ambiente, manequins e suas interações) como objetos intermediários nos processos de concepção. Tradicionalmente, tais objetos de intermediação restringem-se a representações esquemáticas em desenhos CAD, típicas da racionalidade de projetistas e que podem limitar a participação de outros atores não habituados com essa “linguagem”. A integração do CAD com manequins digitais e o suporte da captura de movimentos possibilitam uma melhor incorporação da perspectiva da atividade (conforme o conceito da ergonomia situada) e podem contribuir para a compreensão e troca de conhecimentos entre os atores, auxiliando na concepção de situações produtivas eficazes e seguras em termos de produção e saúde.
-
Suporte financeiro: Nenhum.
Referências
- Badler, N. (1997). Virtual humans for animation, ergonomics, and simulation. Philadelphia: University of Pennsylvania.
- Baptista, M. N., & Campos, D. C. (2010). Metodologia de pesquisa em ciências: análises quantitativa e qualitativa. 2. ed. Rio de Janeiro: LTC.
- Braatz, D., Menegon, N. L., Fontes, A. R. M., & Tonin, L. A. (2012). Simulação humana digital na concepção de postos de trabalho: estudo comparativo de casos. Gestão & Produção, 19(1), 79-92. http://dx.doi.org/10.1590/S0104-530X2012000100006
» http://dx.doi.org/10.1590/S0104-530X2012000100006 - Carvalho, A. G. (2011). Influência da modelagem dos componentes de bias instabilidade dos sensores inerciais no desempenho do navegador integrado SNI/GPS (Dissertação de mestrado). Instituto Militar de Engenharia, Rio de Janeiro.
- Daniellou, F. (2007). A ergonomia na condução de projetos de concepção de sistemas de trabalho. In P. Falzon (Ed.), Ergonomia (Cap. 21, pp. 303-315). São Paulo: Blucher.
- Kang, B., Lee, D., Chung, M., Kyung, G., & Nam, K. (2012). A method to create dynamic motions of digital human models and a case study. In Proceedings of the 56th Human Factors and Ergonomics Society (pp. 2542-2546). Boston: SAGE. http://dx.doi.org/10.1177/1071181312561528
» http://dx.doi.org/10.1177/1071181312561528 - Lämkull, D., Hanson, L., & Örtengren, R. (2009). A comparative study of digital human modelling simulation results and their outcomes in reality: a case study within manual assembly of automobiles. International Journal of Industrial Ergonomics, 39(2), 428-441. http://dx.doi.org/10.1016/j.ergon.2008.10.005
» http://dx.doi.org/10.1016/j.ergon.2008.10.005 - Magistris, G., Micaelli, A., Evrard, P., Andriot, C., Savin, J., Gaudez, C., & Marsot, J. (2013). Dynamic control of DHM for ergonomic assessments. International Journal of Industrial Ergonomics, 43(2), 170-180. http://dx.doi.org/10.1016/j.ergon.2013.01.003
» http://dx.doi.org/10.1016/j.ergon.2013.01.003 - Menegon, N. L., Braatz, D., & Tonin, L. (2011). Simulação humana. In F. Másculo & M. Vidal. Ergonomia: trabalho adequado e eficiente (pp. 365-393). Rio de Janeiro: Elsevier/ABEPRO.
- Menegon, N. L., Braatz, D., Secchin, V. M. S., Regazzini, M. L. L., La Salvia, A. B. N., Pereira, W. A., Naveiro, D. M., Zamberlan, M. C. P. L., & Pastura, F. C. H. (2002). Pesquisa Antropométrica Embraer. In Anais do 12º ABERGO. Rio de Janeiro: ABERGO.
- Panero, J., & Zelnik, M. (2002). Dimensionamento humano para espaços interiores: um livro de consulta e referência para projetos. Barcelona: Gustavo Gili. 320 p.
- Roetenberg, D. (2006). Inertial and magnetic sensing of human motion (Tese de doutorado). Universidade de Twente, Alemanha, Enschede.
- Roetenberg, D., Luinge, H., & Slycke, P. (2013). Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors. The Netherlands: Xsens.
- Santos, W., Tonin, L. A., Brratz, T., Wu, R. L., & Menegon, N. L. (2014). Avaliação de tecnologias de captura de movimentos em projetos de situações produtivas. In Anais do 17º ABERGO. Rio de Janeiro: ABERGO.
- Silva, F. W. S. (1997). Motion Capture: introdução à tecnologia. Rio de Janeiro: Laboratório de Computação Gráfica, COPPE/UFRJ.
- Sundin, A., & Örtengren, R. (2006). Digital human modeling for CAE applications. In G. Salvendy (Ed.), Handbook of human factors and ergonomics (pp. 1053-1078). New Jersey: John e Wiley & Sons.
- Xsens. (2012). Moven: user manual. Moven Motion Capture System. The Netherlands: Xsens Technologies B.V.
- Young, A. D. (2010). From posture to motion: the challenge for the real time wireless inertial motion capture. In Proceedings of the 5th International Conference on Body Area Networks (pp. 131-137). New York: ACM.
- Ziolek, S. A., & Kruithof, P. C. J. (2000). Human modeling & simulation: a primer for practioners. In Proceedings of the 44th HFES (pp. 825-827). San Diego: HFES. http://dx.doi.org/10.1177/154193120004403839
» http://dx.doi.org/10.1177/154193120004403839 - Zülch, G. (2012). Features and limitations of digital human models: a new German guideline. Work: A Journal of Prevention, Assessment and Rehabilitation, 41(Supl 1), 2253-2259. PMid:22317050.
Datas de Publicação
-
Publicação nesta coleção
30 Jun 2016 -
Data do Fascículo
Jul-Sep 2016
Histórico
-
Recebido
9 Set 2014 -
Aceito
15 Mar 2015