ABSTRACT
High-altitude platforms (HAPs) are aircraft, usually unmanned airships or airplanes positioned above 20 km, in the stratosphere, in order to compose a telecommunications network or perform remote sensing. In the 1990 and 2000 decades, several projects were launched, but very few had continued. In 2014, 2 major Internet companies (Google and Facebook) announced investments in new HAP projects to provide Internet access in regions without communication infrastructure (terrestrial or satellite), bringing back attention to the development of HAP. This article aims to survey the history of HAPs, the current state-of-the-art (April 2016), technology trends and challenges. The main focus of this review will be on technologies directly related to the aerial platform, inserted in the aeronautical engineering field of knowledge, not detailing aspects of the telecommunications area.
KEYWORDS
High-altitude platform; High-altitude airship; Stratospheric satellite; Unmanned aerial vehicle; Technological challenges; Technology trends
INTRODUCTION
In the 1990 and 2000 decades, several projects were launched in order to explore the potential application of high altitude platforms for telecommunications and remote sensing. Large projects were started in the United States, Japan and South Korea (Levine 2004Levine J (2004) The promise of ERAST; [accessed 2015 Dec 04]. http://nasa.gov/centers/dryden/news/X-Press/stories/102904_people_erast.html
http://nasa.gov/centers/dryden/news/X-Pr...
; Eguchi and Yokomaku 2000Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
https//repository.exst.jaxa.jp/dspace/bi...
; Lee et al. 2006Lee YG, Kim DM, Yeom CH (2006) Development of Korean high altitude platform systems. Int J Wireless Inform Network 13(1):31-42. doi: 10.1007/s10776-005-0018-6
https://doi.org/10.1007/s10776-005-0018-...
).
High-altitude platforms (HAPs) are aircraft positioned above 20 km altitude, in the stratosphere, in order to compose a telecommunications network or perform remote sensing, for civilian or military applications. These aircraft may be airplanes, airships or balloons, manned or unmanned. The stratosphere is the layer of the atmosphere where the temperature starts to increase with altitude. Immediately after the tropopause, which has a constant temperature of about −60 °C, the stratosphere starts at an altitude of 7 km at the poles and 18 km at the Equator, extending to around 50 km (Widiawan and Tafazolli 2006Widiawan AK, Tafazolli R (2006) High Altitude Platform Station (HAPS): a review of new infrastructure development for future wireless communications. Wireless Pers Comm 42(3):387-404. doi: 10.1007/s11277-006-9184-9
https://doi.org/10.1007/s11277-006-9184-...
).
A remarkable fact for the HAPs concept was the initial definition of a frequency band for its telecommunications services on the World Radiocommunication Conference 1997 (WRC-97), organized by the International Telecommunication Union (ITU), which deals with the regulation of the use of radio frequencies. At this conference, the term “High Altitude Platform Station” (HAPS) has been established, defined as a telecommunications station located at an altitude of 20 to 50 km and at a specified fixed point relative to the Earth. This fact shows that, at the time, there was a growing interest in HAP utilization as a complement to terrestrial and satellite-based communications network.
Over the years, several terms have been used for this type of aircraft, such as: “High Altitude Powered Platform”, “High Altitude Aeronautical Platform”, “High Altitude Airship”, “Stratospheric Platform”, “Stratospheric Airship” and “Atmospheric Satellite”. The term “High Altitude Long Endurance” (HALE), which has sometimes been used to label HAP, is generally more associated with conventional unmanned aerial vehicles (UAVs), with service ceiling of about 18 km, as the Global Hawk. Currently, the expression “High Altitude Platform” (HAP), adopted by the ITU, has been the most commonly used.
The altitude range adopted for HAP operation, around 20 km, is motivated by the facts that in these altitudes the wind speed is less intense and, as a consequence, the HAP requires less power to maintain position (Colozza 2003Colozza A (2003) Initial feasibility assessment of a high altitude long endurance airship. Analex Corporation. NASA/CR-2003-212724; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040021326.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
). The altitude next to 20 km also has the advantage of being positioned above the strong wind currents (jet stream) existing between 10 and 15 km. Other important advantages are a large coverage area for telecommunications and be situated above normal commercial airline traffic. The maximum altitude for controlled airspace varies from country to country, 20 km (65,000 ft) being a typical value, set at the time of Concorde commercial supersonic jet operation (Widiawan and Tafazolli 2006Widiawan AK, Tafazolli R (2006) High Altitude Platform Station (HAPS): a review of new infrastructure development for future wireless communications. Wireless Pers Comm 42(3):387-404. doi: 10.1007/s11277-006-9184-9
https://doi.org/10.1007/s11277-006-9184-...
).
The focus of this review will be on technologies directly related to the aerial platform, inserted in the aeronautical engineering field of knowledge, not detailing aspects of the telecommunications area, such as laser technologies for data link and electronically scanned antenna arrays.
HISTORY
Stratospheric flights above 15 km altitude were already made in the 1930s, in balloons with pressurized gondolas, manned by pioneers such as the Swiss Auguste Piccard. In the 1950 and 1960 decades, aircraft with jet propulsion, as Canberra, U-2 and SR-71, and experimental aircraft with rocket propulsion, such as X-1 and X-15, reached stratospheric altitudes (Von Ehrenfried 2014Von Ehrenfried M (2014) Stratonauts: pioneers venturing into the stratosphere. Berlin: Springer International Publishing.).
One of the first experimental projects specific for HAP research, initiated in 1969, was the unmanned airship High Platform II, built by Raven company, with support from the US Navy. The purpose was to analyze the feasibility of platforms for high-altitude reconnaissance. The vehicle had 25 m length, 62 kg weight, electric propulsion with propeller and power of 300 W supplied by solar cells. A flight was realized in 1970, with little more than one hour duration, reaching an altitude of about 21 km. The High Platform II (Fig. 1) became the first airship to perform a powered stratospheric flight (Korn 1974Korn AO (1974) Unmanned powered balloons. Proceedings of the 8th AFCRL Scientific Balloon Symposium; Hyannis, USA; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a003398.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a003398...
; Smith and Rainwater 2003Smith MS, Rainwater EL (2003) Applications of scientific ballooning technology to high altitude airships. Proceedings of the 3rd AIAA Annual Aviation Technology, Integration, and Operations (ATIO) Forum; Denver, USA; [accessed 2015 Dec 04]. arc.aiaa.org/doi/pdf/10.2514/6.2003-6711
arc.aiaa.org/doi/pdf/10.2514/6.2003-6711...
). Other studies, supported by the US Department of Defense (DoD), began in the 1970s, as Powered Ballon (POBAL) and High Altitude Superpressure Powered Airship (HASPA), but none of them had continuity (Korn 1974Korn AO (1974) Unmanned powered balloons. Proceedings of the 8th AFCRL Scientific Balloon Symposium; Hyannis, USA; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a003398.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a003398...
; Colozza 2003Colozza A (2003) Initial feasibility assessment of a high altitude long endurance airship. Analex Corporation. NASA/CR-2003-212724; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040021326.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
).
High Platform II Airship, 1970, Raven (Smith and Rainwater 2003Smith MS, Rainwater EL (2003) Applications of scientific ballooning technology to high altitude airships. Proceedings of the 3rd AIAA Annual Aviation Technology, Integration, and Operations (ATIO) Forum; Denver, USA; [accessed 2015 Dec 04]. arc.aiaa.org/doi/pdf/10.2514/6.2003-6711
arc.aiaa.org/doi/pdf/10.2514/6.2003-6711... ).
APPLICATIONS
The main HAP applications are in telecommunications and remote sensing, both civilian and military. In the area of telecommunications some of the advantages of HAPs in relation to terrestrial networks (relay towers) are larger coverage area, less interference caused by obstacles (buildings, ground elevations) and shorter time to deployment. Compared to satellites, HAPs have the advantages of lower latency (transmission delay) and the possibility of return for maintenance or payload reconfiguration (Grace and Mohorcic 2011Grace D, Mohorcic M (2011) Broadband communications via high altitude platforms. Hoboken: John Wiley and Sons.).
For remote sensing, HAPs have as an important advantage over satellites, mainly the low orbit ones, the ability to remain continuously over an area for very long periods (persistence). Another advantage is to permit better resolution images, because they are closer to the covered areas (Wang 2011Wang WQ (2011) Near-space remote sensing: potential and challenges. Berlin: Springer.).
PLATFORM TYPES
The most common types of aircraft used as HAP are: airplanes, airships and balloons. In the “Main Projects” section, this paper presents examples for each of these types. HAPs can be manned aircraft or UAV. Examples of manned airplanes that can act as HAPs are: U-2, WB-57, M-55 and G520 (Colozza 2003Colozza A (2003) Initial feasibility assessment of a high altitude long endurance airship. Analex Corporation. NASA/CR-2003-212724; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040021326.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
; Grace and Mohorcic 2011Grace D, Mohorcic M (2011) Broadband communications via high altitude platforms. Hoboken: John Wiley and Sons.). A manned airplane designed from the beginning to serve as HAP was Proteus, built in 1999 by the American company Scaled Composites for the High Altitude Long Operation (HALO) concept, from Angel Technologies Corporation (Karapantazis and Pavlidou 2005Karapantazis S, Pavlidou FN (2005) Broadband communications via high-altitude platforms: a survey. IEEE Communications Surveys and Tutorials 7(1):2-31. doi: 10.1109/COMST.2005.1423332
https://doi.org/10.1109/COMST.2005.14233...
). Figure 2 shows a picture of Proteus with a telecommunications antenna pod installed under the fuselage. As one of the objectives required by HAPs are very-long-duration flights at high altitude, counted in months and even years; all HAP projects identified after the year 2000 have been of unmanned aircraft, due to the complexity to maintain human beings in these extreme operating conditions.
Proteus Manned Airplane, Scaled Composites, Angel Technologies (Karapantazis and Pavlidou 2005Karapantazis S, Pavlidou FN (2005) Broadband communications via high-altitude platforms: a survey. IEEE Communications Surveys and Tutorials 7(1):2-31. doi: 10.1109/COMST.2005.1423332
https://doi.org/10.1109/COMST.2005.14233... ).
MAIN PROJECTS
Over the past 20 years, several projects for research and development of HAPs were started. Many initiatives were responsibility of small and medium enterprises, and the vast majority had no evolution. Examples of these unsuccessful projects are: SkyStation (US), HALO (US), and StratSat (UK) (Grace and Mohorcic 2011Grace D, Mohorcic M (2011) Broadband communications via high altitude platforms. Hoboken: John Wiley and Sons.). But some HAP projects reached more advanced stages of development, involving significant financial resources. Twelve of these major projects were selected and are presented below in chronological order of project start year.
HELIOS (ERAST PROGRAM)
The Environmental Research Aircraft and Sensor Technology (ERAST) Program, initiated in 1994 and conducted by NASA in conjunction with industry, aimed to develop and demonstrate technologies that enable an aircraft at high altitude to perform long-duration missions for environmental monitoring (Levine 2004Levine J (2004) The promise of ERAST; [accessed 2015 Dec 04]. http://nasa.gov/centers/dryden/news/X-Press/stories/102904_people_erast.html
http://nasa.gov/centers/dryden/news/X-Pr...
). The ERAST Program addressed only fixed-wing aircraft, therefore airships were not included.
The family of unmanned solar energy aircraft developed by AeroVironment, for the ERAST Program, reached altitude records with the Pathfinder (21.48 km, 1997) and Helios (29.52 km, 2001). The Helios (Fig. 3) had a span of 75 m and a total weight of 1,052 kg, having been tested in different flight configurations with 10 and 14 electric motors (Noll et al. 2007Noll TE, Ishmael SD, Henwood B, Perez-Davis ME, Tiffany GC, Madura J, Gaier M, Brown JM, Wierzbanowski T (2007) Technical findings, lessons learned, and recommendations resulting from the helios prototype vehicle mishap; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070022260.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
). In 2000, AeroVironment estimated that, to transform Helios in a marketable product, especially for telecommunications services, it would be necessary an investment of 300 million dollars, in addition to the 50 million dollars spent on the prototype, up to that time, by the company and NASA (Colker 2000Colker D (2000) An idea that just took off. Los Angeles Times; [accessed 2015 Dec 04]. http://articles.latimes.com/print/2000/jun/11/business/fi-39796
http://articles.latimes.com/print/2000/j...
).
In June 2003, the Helios prototype was lost in an accident near the island of Kauai, in Hawaii (Noll et al. 2007Noll TE, Ishmael SD, Henwood B, Perez-Davis ME, Tiffany GC, Madura J, Gaier M, Brown JM, Wierzbanowski T (2007) Technical findings, lessons learned, and recommendations resulting from the helios prototype vehicle mishap; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070022260.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
). About 30 minutes after takeoff, the Helios encountered turbulence, at 853 m altitude, causing oscillations and structural failure of the aircraft, which crashed into the sea. The ERAST Program was closed in 2004 (NASA 2004National Aeronautics and Space Administration (2004) Helios — project description; [accessed 2015 Dec 04]. http://www.nasa.gov/centers/dryden/multimedia/imagegallery/Helios/Helio_proj_desc.html
http://www.nasa.gov/centers/dryden/multi...
).
HISENTINEL80
The purpose of the HiSentinel Program was to develop a low-cost unmanned airship system capable of carrying payloads from 9 to 90 kg at high altitudes, with flight duration greater than 30 days. This US Army initiative began in 1996 with the family of airships Sounder (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
). The prime contractor for the development was the Southwest Research Institute (SwRI). The American company Aerostar International, of the Raven Group, was subcontracted for envelope manufacturing and flight tests support. These airships would be launched from remote locations without the need for special facilities such as large hangars. For this, the HiSentinel airships are released not fully inflated, similarly to high-altitude weather balloons. At the end of the mission, the equipment module, which includes the payload and battery, is detached from the envelope and returned to the ground by parachute (Lee et al. 2009Lee M, Smith S, Androulakakis S (2009) The high altitude lighter-than-air airship efforts at the US Army Space and Missile Defense Command/Army Forces Strategic Command. Proceedings of the 18th AIAA Lighter-Than-Air Systems Technology Conference; Seatle, USA.).
The HiSentinel family consists of 3 different vehicles: HiSentinel20, 50 and 80, respectively with 20, 50 and 80 lb (9, 23 and 36 kg) of payload (Lee et al. 2009Lee M, Smith S, Androulakakis S (2009) The high altitude lighter-than-air airship efforts at the US Army Space and Missile Defense Command/Army Forces Strategic Command. Proceedings of the 18th AIAA Lighter-Than-Air Systems Technology Conference; Seatle, USA.). The HiSentinel80 (Fig. 4) was 61 m long and designed to fly at an altitude of 20 km for 30 days or more. Just one flight was conducted in November 2010, lasting 8 hours, instead of the planned 24 hours, reaching 20 km. The propulsive system did not worked in flight due to the failure of a component of the electric motor control (Smith et al. 2011Smith S, Fortenberry M, Michael L, Judy R (2011) HiSentinel80: flight of a high altitude airship. Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference; Virginia Beach, USA.). The HiSentinel Program, inside the DoD, was completed in 2012, without prevision of new financial resources allocation. In the 2007 – 2012 period, the program received 11.2 million dollars (GAO 2012Government Accountability Office (2012) Future aerostat and airship investment decisions drive oversight and coordination needs. Report GAO-13-81.).
HiSentinel80 Airship, SwRI, Aerostar (Smith et al. 2011Smith S, Fortenberry M, Michael L, Judy R (2011) HiSentinel80: flight of a high altitude airship. Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference; Virginia Beach, USA.).
STRATOSPHERIC PLATFORM (SPF)
Feasibility studies of the Japanese Stratospheric Platform (SPF) Program started in 1998 and lasted 18 months, under the leadership of the National Aerospace Laboratory (NAL), currently the Japan Aerospace Exploration Agency (JAXA). The objective of the SPF Program was to develop a system based on a large unmanned airship, able to maintain position about 20 km altitude, targeting applications in future telecommunications networks and Earth observation sciences. The planning was for an 8 years development (Eguchi and Yokomaku 2000Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
https//repository.exst.jaxa.jp/dspace/bi...
).
SPF Airship, JAXA (Eguchi and Yokomaku 2000Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
https//repository.exst.jaxa.jp/dspace/bi... ).
In the SPF Program, the full scale airship (Fig. 5) would have 245 m length, 32 tons of mass, 1 ton payload, energy provided by solar cells (photovoltaics cells) during the day and regenerative fuel cells (RFC) at night, as well as the ability to maintain position at an altitude of 20 km, with winds up to 30 m/s. The plan was for continuous operation up to 3 years, limited by system maintenance actions. Since 2000, the program received financial support from the Millennium Project, promoted by the Prime Minister’s Office (Eguchi and Yokomaku 2000Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
https//repository.exst.jaxa.jp/dspace/bi...
).
A hangar, 80 m long and 20 m high, in heptagonal shape, was built in the town of Taiki, Hokkaido Island. For demonstration of the SPF Airship technologies, 2 test vehicles, SPF-1 and SPF- 2, were developed. The unpowered SPF-1 was 42 m long, reaching an altitude of 16 km in the vertical-attitude launch test, in August 2003 (Onda and Sano 2006Onda M, Sano M (2006) Test vehicle proposal to next Japanese stratospheric LTA developments. Proceedings of the 6th AIAA Aviation Technology, Integration and Operations (ATIO) Conference; Wichita, USA.). The low-altitude SPF-2 unmanned airship, 68 m long, was aimed to demonstrate some of the key technologies of SPF, such as flight control, and to conduct experiments for Earth observation and telecommunications. The Fuji Heavy Industries was the prime contractor for the development of SPF-2. In 2004, the SPF-2 performed 8 flights, in altitudes up to 4 km (Nakadate 2005Nakadate M (2005) Development and flight test of SPF-2 Low Altitude Stationary Flight Test Vehicle. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; Arlington, USA.).
The SPF Program was terminated in 2005, with a total spending of about 200 million dollars, without getting financial support for continuation of the full-scale development phase (Onda and Sano 2006Onda M, Sano M (2006) Test vehicle proposal to next Japanese stratospheric LTA developments. Proceedings of the 6th AIAA Aviation Technology, Integration and Operations (ATIO) Conference; Wichita, USA.). System components research activities, such as RFC system, considered as one of the 2 key technologies, beside of lightweight materials for the envelope, continued in JAXA (Okaya and Shinozaki 2011Okaya S, Shinozaki N (2011) R&D status of RFC technology for SPF airship in Japan. Proceedings of the 9th Annual International Energy Conversion Engineering Conference; San Diego, USA.). No information was found about the present situation of HAP technologies research in JAXA.
STRATOSPHERIC AIRSHIP
The Korean Stratospheric Airship Program, started in December 2000, was planned to be developed in a 10-year term. The ultimate goal of the program was a 200 m long airship (VIA 200) (Fig. 6), 22 tons total weight, with capacity to hold position at 20 km altitude, with winds up to 12 m/s, carrying a 1,000 kg payload (Lee et al. 2006Lee YG, Kim DM, Yeom CH (2006) Development of Korean high altitude platform systems. Int J Wireless Inform Network 13(1):31-42. doi: 10.1007/s10776-005-0018-6
https://doi.org/10.1007/s10776-005-0018-...
; Bang et al. 2008Bang H, Lee S, Lee H (2008) Nonlinear trajectory tracking using vectorial backstepping approach. Proceedings of the 2008 International Conference on Control, Automation and Systems (ICCAS 2008);Seoul; South Korea.; Lee et al., 2014Lee S, Jang J, Ryu H, Lee KH (2014) Matching trajectory optimization and nonlinear tracking control for HALE. Adv Space Res 54(9):1870-1887. doi: 10.1016/j.asr.2014.07.007
https://doi.org/10.1016/j.asr.2014.07.00...
). Possible applications would be communication relay and ground observation. The project received support from the Ministry of Commerce, Industry and Energy (MOCIE).
VIA 200 Airship, KARI (Bang et al. 2008Bang H, Lee S, Lee H (2008) Nonlinear trajectory tracking using vectorial backstepping approach. Proceedings of the 2008 International Conference on Control, Automation and Systems (ICCAS 2008);Seoul; South Korea.).
The Korea Aerospace Research Institute (KARI) has completed Phase 1 of the Program in 2004, with the development of a 50 m long unmanned airship (VIA 50). This airship is able to achieve maximum altitude of 5 km and to carry a 100 kg payload. Also in this first phase, a new hangar was built in Goheung, in the southern region of the country. The VIA 50 first flight was in October 2003, in Goheung (Lee et al. 2006Lee YG, Kim DM, Yeom CH (2006) Development of Korean high altitude platform systems. Int J Wireless Inform Network 13(1):31-42. doi: 10.1007/s10776-005-0018-6
https://doi.org/10.1007/s10776-005-0018-...
).
Phase 2, for the VIA 200 development, started in 2004 but was halted in 2005 (Lee 2006Lee HJ (2006) R&D on HAPs in Korea. ETRI; [accessed 2015 Dec 04]. www.capanina.org/yorkhapweek/DOCS/HAS-WP-4.pdf
www.capanina.org/yorkhapweek/DOCS/HAS-WP...
). There is no information on the current status of the Stratospheric Airship Program at KARI. There is an ongoing project at KARI to develop an unmanned solar energy airplane for high-altitude flights. This solar UAV, EAV-3, similar to Zephyr 7, conducted a flight up to 14 km altitude in August 2015 (Jin-Young 2015Jin-Young C (2015) Solar-powered UAV succeeds in flying 14 km above sea level. Business Korea; [accessed 2016 May 02]. http://www.businesskorea.co.kr/english/news/sciencetech/11694 -flying-high-solar-powered-uav-succeeds-flying-14-km-above-sea-level
http://www.businesskorea.co.kr/english/n...
).
ZEPHYR
The development of Zephyr solar high-altitude UAV family began in 2001 (Rapinett 2009Rapinett A (2009) Zephyr : a high altitude long endurance unmanned air vehicle (Master’s thesis). Guildford: University of Surrey; [accessed 2015 Dec 04]. personal.ph.surrey.ac.uk/~phs1pr/mphys-dissertations/2009/Rapinett-MPhys09.pdf
personal.ph.surrey.ac.uk/~phs1pr/mphys-d...
). In July 2010, the Zephyr 7 (Fig. 7), developed by the British company QinetiQ, established the current flight endurance record of 336 hours and 21 minutes (14 days), flying at about 18 km altitude on a US Army test range, in Yuma, Arizona (Amos 2010Amos J (2010) ‘Eternal plane’ returns to Earth. BBC News; [accessed 2015 Dec 04]. http://bbc.co.uk/news/science-environment-10733998). The Zephyr 7, with 23 m wingspan, 55 kg weight, and 5 kg payload, has two propellers driven by electric motors and uses the energy from solar panels during the day and lithium-sulfur batteries at night (Brown 2015Brown N (2015) Light fantastic : Airbus details Zephyr development plans. Jane’s International Defence Review; [accessed 2016 May 02]. https://janes.ihs.com/InternationalDefenceReview/DisplayFile/idr17957?edition=2015
https://janes.ihs.com/InternationalDefen...
).
Zephyr 7 UAV, QinetiQ, Airbus (Mecrow et al. 2010Mecrow BC, Bennett JW, Jack AG, Atkinson DJ, Freeman AJ (2010) Drive topologies for solar-powered aircraft. IEEE Trans Ind Electron 57(1):457-464. doi: 10.1109/TIE.2009.2031190
https://doi.org/10.1109/TIE.2009.2031190... ).
In 2013, Astrium, currently Airbus Defence and Space, purchased the Zephyr Project from QinetiQ. Airbus is developing the Zephyr S version (single-tail), formerly Zephyr 8, keeping the payload in 5 kg, but with greater autonomy by the use of new solar cells and batteries and structural weight reduction (Stevenson 2015Stevenson B (2015) Pseudo satellite warms up for market — Zephyr. Flight International 187(5484): 25-25., 2016Stevenson B (2016) Twin-tailed Airbus Zephyr completes maiden flight. Flight Global; [accessed 2016 May 06]. https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/
https://www.flightglobal.com/news/articl...
; Airbus Defence and Space 2016Airbus Defence and Space (2016) United Kingdon Ministry of Defence places order for two solar-powered Airbus Zephyr 8s; [accessed 2016 May 02]. http://www.airbusgroup.com/int/en/news-media/press-releases/Airbus-Group/Financial_Communication/2016/02/20160218_airbus_defence_and_space_zephyr_uk.html
http://www.airbusgroup.com/int/en/news-m...
). A future new version, Zephyr T (twin-tail), will have a payload of 20 kg with an increase in the wingspan (Fig. 8). Flight testing of a scale model of Zephyr T began in 2016. The first flight of a full-scale Zephyr T is planned for 2018 (Stevenson 2016Stevenson B (2016) Twin-tailed Airbus Zephyr completes maiden flight. Flight Global; [accessed 2016 May 06]. https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/
https://www.flightglobal.com/news/articl...
). In February 2016, Airbus received from the UK Ministry of Defence a request for the production and operation of 2 Zephyr S, worth 13 million pounds (about 18 million dollars), with flights scheduled to 2017 (Airbus 2016Airbus Defence and Space (2016) United Kingdon Ministry of Defence places order for two solar-powered Airbus Zephyr 8s; [accessed 2016 May 02]. http://www.airbusgroup.com/int/en/news-media/press-releases/Airbus-Group/Financial_Communication/2016/02/20160218_airbus_defence_and_space_zephyr_uk.html
http://www.airbusgroup.com/int/en/news-m...
; Stevenson 2016Stevenson B (2016) Twin-tailed Airbus Zephyr completes maiden flight. Flight Global; [accessed 2016 May 06]. https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/
https://www.flightglobal.com/news/articl...
). This is the first contract in the world for providing an operational HAP.
Zephyr T and Zephyr S UAVs, Airbus (Stevenson 2016Stevenson B (2016) Twin-tailed Airbus Zephyr completes maiden flight. Flight Global; [accessed 2016 May 06]. https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/
https://www.flightglobal.com/news/articl... ).
HALE-D (HAA PROGRAM)
The objective of the US Army High Altitude Airship (HAA) Program, initiated in 2002, was to develop an operating system based on a high-altitude airship, able to carry a payload (on the order of 907 to 1,814 kg) to an altitude of 20 km for months. The High Altitude Long Endurance Demonstrator (HALE-D) Project, started in 2008, was a HAA technology demonstrator, with Lockheed Martin as the prime contractor (Lee et al. 2009Lee M, Smith S, Androulakakis S (2009) The high altitude lighter-than-air airship efforts at the US Army Space and Missile Defense Command/Army Forces Strategic Command. Proceedings of the 18th AIAA Lighter-Than-Air Systems Technology Conference; Seatle, USA.). The demonstrator had a length of 73 m, a total mass of 1,361 kg and a payload of 36 kg. It was designed to maintain a flight at 18 km altitude for 2 weeks. The first and only HALE-D flight (Fig. 9) was held in July 2011 (Androulakakis and Judy 2013Androulakakis SP, Judy RA (2013) Status and plans of High Altitude Airship (HAA) Program. Proceedings of the AIAA Lighter-Than-Air Systems Technology (LTA) Conference; Dayton Beach, USA.).
HALE-D Airship, Lockheed Martin (Androulakakis and Judy 2013Androulakakis SP, Judy RA (2013) Status and plans of High Altitude Airship (HAA) Program. Proceedings of the AIAA Lighter-Than-Air Systems Technology (LTA) Conference; Dayton Beach, USA.).
In this flight, the airship did not exceed the altitude of 10 km. It was noticed a decrease in the rate of climb, which could take the airship to leave the restricted area defined by the American air traffic control agency (Federal Aviation Administration — FAA). It was decided to command an emergency recovery, with release of the helium gas. The aircraft descended on trees, after 2 hours and 40 minutes of flight. During the recovery operation, after removal of most of the equipment, a short circuit in solar panels caused a fire, destroying the aircraft. No person was injured due to the accident. After the accident analysis, it was verified that the rate of climb decrease was caused by freezing in the air valve. The program was terminated in 2011, with no provision for allocation of new DoD resources (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
). In the period from 2008 to 2012, the HALE-D Project received 36.3 million dollars (GAO 2012Government Accountability Office (2012) Future aerostat and airship investment decisions drive oversight and coordination needs. Report GAO-13-81.). Despite the accident, caused by a subsystem failure, the work carried out indicates that it is very likely that the HALE-D Project will be successful in case it is resumed (Androulakakis and Judy 2013Androulakakis SP, Judy RA (2013) Status and plans of High Altitude Airship (HAA) Program. Proceedings of the AIAA Lighter-Than-Air Systems Technology (LTA) Conference; Dayton Beach, USA.).
INTEGRATED SENSOR IS STRUCTURE
Integrated Sensor Is Structure (ISIS) is a joint US Air Force (USAF) and Defense Advanced Research Projects Agency (DARPA) program which started in 2004 with the aim of integrating a large radar in the structure of a high-altitude unmanned airship. Lockheed Martin was the prime contractor for the airship development and Raytheon, for the radar development (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
). In its demonstration version, the airship would have a length of 156 m, a total mass of 15,876 kg and a payload of 1,316 kg, capable of flying at the altitude of 20 km for one year. In the final version (Fig. 10), the ISIS airship would have 305 m in length, total mass of 152,861 kg and payload of 17,599 kg (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
). The program was restructured in 2012, starting to focus on development risk reduction activities for radar and airship envelope materials. The ISIS Program has used lessons learned in the Army HALE-D Project (GAO 2012Government Accountability Office (2012) Future aerostat and airship investment decisions drive oversight and coordination needs. Report GAO-13-81.). From 2007 to 2012, 471 million dollars were spent on the ISIS Program, including radar research activities (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
). The ISIS Program was closed in 2015 (DoD 2015US Department of Defense (2015) RDT&E budget item justification: PB 2016 Air Force. PE 0305205F Endurance Unmanned Aerial Vehicles; [accessed 2015 Dec 04]. http://www.dtic.mil/descriptivesum/Y2016/AirForce/stamped/0305205F_7_PB_2016.pdf
http://www.dtic.mil/descriptivesum/Y2016...
).
ISIS Airship, Lockheed Martin (GAO 2012Government Accountability Office (2012) Future aerostat and airship investment decisions drive oversight and coordination needs. Report GAO-13-81.).
SOLAREAGLE (VULTURE PROGRAM)
The Very high altitude, Ultra endurance, Loitering Theatre Unmanned Reconnaissance Element (Vulture) Program, coordinated by DARPA, had the purpose of developing a high-altitude airplane with ability to remain in flight for 5 years, with a payload of 454 kg, which consume 5kW. This platform would be employed in Intelligence, Surveillance and Reconnaissance (ISR) and communication missions (IHS 2015IHS (2015) Vulture Program. Jane’s unmanned aerial vehicles and targets; [accessed 2016 May 02]. https://janes.ihs.com/UnmannedAerial/Display/1318705
https://janes.ihs.com/UnmannedAerial/Dis...
).
The first phase of the program began in 2008 with conceptual studies and duration of 12 months. Three companies were contracted for this phase: Boeing (3.84 million dollars), Lockheed Martin (4.27 million dollars) and Aurora Flight Sciences (3.64 million dollars) (FBO 2008Federal Business Opportunities (2008) Award Notice BAA 07-51 — Vulture Program; [accessed 2015 Dec 04]. https://www.fbo.gov/?s=opportunity&mode=form&tab=core&id=5bffbe1738e2769b8e8b99d8e6e29b2e&_cview=0
https://www.fbo.gov/?s=opportunity&mode=...
). The second phase (Risk Reduction Demonstration — RRD) started in 2012 and included the construction of a subscale vehicle, including demonstration of a flight with 3 months duration. Three companies submitted solar planes proposals for the second phase (Fig. 11). The Odysseus, proposed by Aurora, presented an innovative concept. Three aircraft, each with 49 m wingspan, would take off separately and would be jointed, by the wing tip, to form a single aircraft at high altitude. During the day the aircraft would take the Z form to maximize the solar energy capture. At night, the wing would be set to a straight form to minimize aerodynamic drag. Boeing was the winner to perform the second phase, with the 122 m wingspan SolarEagle, in a contract of 89 million dollars. The first flight was planned to 2014 (IHS 2015IHS (2015) Vulture Program. Jane’s unmanned aerial vehicles and targets; [accessed 2016 May 02]. https://janes.ihs.com/UnmannedAerial/Display/1318705
https://janes.ihs.com/UnmannedAerial/Dis...
;Boeing 2013Boeing (2013) Solar Eagle; [accessed 2015 Dec 04]. www.boeingimages.com/C.aspx?VP3=SearchResult&VBID=2JRSN2DOWLAO2). The initial DARPA estimated budget for the Phase 2 of the Vulture Program was 155 million dollars (DARPA 2009Defense Advanced Research Projects Agency (2009) Vulture II Special Notice. DARPA-SN-09-41; [accessed 2015 Dec 04]. https://www.fbo.gov/utils/view?id=81a4a506912acdadd6929b7629f1a4d9
https://www.fbo.gov/utils/view?id=81a4a5...
).
Vulture Program — DARPA. Proposals for Phase 2: Boeing (SolarEagle), Lockheed Martin, Aurora Flight Systems (Odysseus) (Defense Industry Daily 2010Defense Industry Daily (2010) DARPA’s Vulture: what goes up, needn’t come down; [accessed 2015 Dec 04]. http://www.defenseindustrydaily.com/DARPAs-Vulture-What-Goes-Up-Neednt-Come-Down-04852/
http://www.defenseindustrydaily.com/DARP... ).
In 2012, the Vulture Program was restructured, with the SolarEagle development being stopped and going to focus only on technologies for solar energy (Photovoltaic Cells) and energy storage (RFC) (Defense Daily 2013Defense Daily (2013) DARPA plans venture energy subsystem flight-like ground test in 2015; [accessed 2015 Dec 04]. http://www.defensedaily.com/darpa-plans-venture-energy-subsystem-flight-like-ground-test-in-2015/
http://www.defensedaily.com/darpa-plans-...
). There is no information about the present situation of the Vulture Program and SolarEagle Project.
STRATOBUS
Studies of the technical concept and business model of the StratoBus Airship started at Thales Alenia Space in 2010 (Warwick 2014Warwick G (2014) Facebook joins Google in race to connect the world. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin-only/facebook-joins-google-race-connect-world
http://aviationweek.com/awin-only/facebo...
). The StratoBus (Fig. 12) is a stratospheric unmanned airship 100 m long, with 33 m diameter, a total weight of less than 5,000 kg, with 250 kg and 5 kW available for payload. The operating altitude is 20 km, in one-year flight periods, limited by maintenance stops, which includes lifting gas replenishment (Thales Alenia Space 2016aThales Alenia Space (2016a) Stratobus; [accessed 2016 May 02]. https://www.thalesgroup.com/en/worldwide/space/news/new-video-stratobus-we-go
https://www.thalesgroup.com/en/worldwide...
). The StratoBus design incorporates some innovative solutions such as the use of a transparent envelope section that allows sunlight reflection in concentrators mirrors directed to solar panels inside the airship (Thales Alenia Space patent). This allows a reduction in the size and weight of the solar panels and also protects the solar cells from the degradation caused by the stratospheric environment. Another innovation is the use of a large ring fixing the engines and the equipment gondola, allowing the airship to rotate for better sunlight harness. During the night, the electricity will be provided by an RFC (Thales Alenia Space 2016aThales Alenia Space (2016a) Stratobus; [accessed 2016 May 02]. https://www.thalesgroup.com/en/worldwide/space/news/new-video-stratobus-we-go
https://www.thalesgroup.com/en/worldwide...
).
The Thales Alenia Space planning is of 2 years for development of key technologies, such as the envelope material and the RFC, 2 years to build the first prototype and one year for flight tests. The forecast is that the product may be offered to the market after 2020 (Thales Alenia Space 2015Thales Alenia Space (2015) Thales: all about Stratobus; [accessed 2015 Dec 04]. http://www.thalesgroup.com/en/worldwide/space/magazine/space-qa-all-about-stratobus
http://www.thalesgroup.com/en/worldwide/...
). In April 2016, the project received an investment of 17 million euros (about 19 million dollars) from the French government for the 2-year key technologies development phase. A demonstrator flight is scheduled for 2018 (Thales Alenia Space 2016bThales Alenia Space (2016b) Stratobus project takes off! Press Release; [accessed 2016 May 02]. https://www.thalesgroup.com/sites/default/files/asset/document/pr_stratobus_kick_off_20160426_en_0.pdf
https://www.thalesgroup.com/sites/defaul...
).
PROJECT LOON
Project Loon, from Google, started in 2012 and has the objective to create a network of stratospheric balloons to provide Internet access in remote areas (Simonite 2015aSimonite T (2015a) Project Loon. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/534986/project-loon/
https://www.technologyreview.com/s/53498...
). Each balloon (Fig. 13) is of the superpressure type with 15 m diameter. The altitude control is performed by adding or removing air inside the balloon, with the use of a fan. With this, it is possible to select altitudes where the wind is in a convenient direction. The flight altitude is about 20 km, lasting up to 100 days, using energy from solar panels. The idea is to launch a constellation of several balloons, forming a ring at determinate latitude (Metz 2015Metz R (2015) Project Loon head details how the balloons interact. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/537956/emtch-digital-project-loon-head-details-how-the-balloons-interact/
https://www.technologyreview.com/s/53795...
). Several tests have been conducted with the release of dozens of balloons, in places like New Zealand, Australia and northeastern Brazil. In February 2016, following an agreement with the government of Sri Lanka, Google started tests to provide Internet access services in the country using the Project Loon balloons, in a joint work with local operating companies (Tung 2016Tung L (2016) Google’s Project Loon: now its Internet-beaming balloon tests take off in Sri Lanka; [accessed 2016 May 02]. http://www.zdnet.com/article/googles-project-loon-now-its-internet-beaming-balloon-tests-take-off-in-sri-lanka/
http://www.zdnet.com/article/googles-pro...
). Another important event in 2016, in Puerto Rico, was the test of an autolauncher crane specially built for the project, enabling the launch of a balloon in just 30 minutes (Google 2016Google (2016) Project Loon; [accessed 2016 May 02]. https://plus.google.com/+ProjectLoon/posts/HaRocUbUSae
https://plus.google.com/+ProjectLoon/pos...
).
Three balloons of the Project Loon, Google (Simonite 2015aSimonite T (2015a) Project Loon. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/534986/project-loon/
https://www.technologyreview.com/s/53498... ).
SOLARA PROJECT
In April 2014, Google bought the American company Titan Aerospace, a developer of Solara 50 high-altitude UAV (Fig. 14). The Solara 50 was announced by Titan Aerospace in 2013 (Warwick 2013Warwick G (2013) VLJ Pioneer bets on Atmosat UAV market. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin/vlj-pioneer-bets-atmosat-uav-market). The aircraft has a wingspan of 50 m and a total weight of 159 kg, with 32 kg payload. It is expected that the Solara 50 will be capable of flying at 20 km for up to 5 years (Aerospace Technology 2013Aerospace Technology (2013) Solara 50 Atmospheric Satellite; [accessed 2015 Dec 04]. http://www.aerospace-technology.com/projects/solara-50-atmospheric-satellite/
http://www.aerospace-technology.com/proj...
).
In May 2015, the prototype of the Solara 50 was destroyed in an accident on its first flight, shortly after takeoff, in a test area in New Mexico, US. The accident was caused by structural failure of the wing due to air currents (thermals) at low altitude (NTSB 2015National Transportation Safety Board (2015) DCA15CA117 — Solara 50 accident; [accessed 2015 Dec 04]. http://www.ntsb.gov/_layouts/ntsb.aviation/brief.aspx?ev_id=2015050X854108&key=1
http://www.ntsb.gov/_layouts/ntsb.aviati...
). Google announced that it will continue the development of the Solara 50 (Warwick 2015Warwick G (2015) Google perseveres after Titan UAV crash. Aerospace Daily and Defense Report; [accessed 2015 Dec 04]. http://aviationweek.com/technology/google-perseveres-after-titan-uav-crash
http://aviationweek.com/technology/googl...
).
AQUILA
In March 2014, Facebook announced the purchase of the British company Ascenta with staff which participaded in he development of Zephyr at QinetiQ, in a deal valued at 20 million dollars (Arthur and Michel 2015Arthur B, Michel H (2015) High-altitude drones. Center for the Study of the Drone; [accessed 2015 Dec 04]. http://dronecenter.bard.edu/high-altitude-drones/). The Aquila UAV (Fig. 15), being developed by Facebook, is a flying wing with a wingspan of 42 m and a total weight of about 400 kg. The aircraft has four propellers driven by electric motors, with power supplied by solar cells during the day and rechargeable batteries at night. The Aquila will fly between 18 and 27 km altitude, for a period of 3 months. It will be taken to the stratosphere by a helium balloon. It is expected the use of a laser connection to form a high-speed communications network. In case of obstruction by clouds, it will be used a radio connection with some reduction in data rate. A 1:10 scalemodel conducted flight tests in March 2014, in the UK (Simonite 2015bSimonite T (2015b) Meet Facebook’s stratospheric Internet drone. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/539756/meet-facebooks-stratospheric-internet-drone/
https://www.technologyreview.com/s/53975...
). In February 2016, India telecommunications authorities denied permission to Facebook for deploying the “Free Basics” service in the country, which provides free access to the Internet, but only for sites selected by the company (Hempel 2016Hempel J (2016) India bans Facebook’s basics app to support net neutrality; [accessed 2016 May 02]. http://www.wired.com/2016/02/facebooks-free-basics-app-is-now-banned-in-india/
http://www.wired.com/2016/02/facebooks-f...
). According to Facebook, this service would connect millions of Indian citizens currently without access to the Internet. There is no information whether this denial will affect Facebook’s plans for Aquila.
Aquila UAV, Ascenta, Facebook (Simonite 2015bSimonite T (2015b) Meet Facebook’s stratospheric Internet drone. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/539756/meet-facebooks-stratospheric-internet-drone/
https://www.technologyreview.com/s/53975... ).
OTHER PROJECTS
In addition to these main HAP projects presented above, several others may be cited. In the United States, there are three projects in progress of medium- and high-altitude UAV, with the goal of 1 week or more autonomy, using hydrogen as a fuel: Global Observer (AeroVironment), Orion (Aurora Flight Sciences) and Phantom Eye (Boeing) (Sweetman 2013Sweetman B (2013) Hard times for long-endurance vehicles. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin/hard?times?long?endurance?vehicles
http://aviationweek.com/awin/hard?times?...
). Two maneuverable balloon projects were supported by the DoD and NASA in the period from 2002 to 2010; however, they are currently paralyzed: StarLight (Global Near Space Services) and High Altitude Shuttle System (Near Space Corporation). These stratospheric balloons have controlability provided by a propulsion system installed in the suspended payload gondola. At the end of the mission duration, the payload in the form of an airplane is separated from the balloon envelope, which is discarded, and returns to the ground in a controlled flight (DoD 2012US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
www.dtic.mil/dtic/tr/fulltext/u2/a568211...
).
In Europe, several projects related to HAP were conducted with support of the European Comission, particularly in the period from 2002 to 2009. The main focus of these projects was research in telecommunications topics. Examples of these projects are HeliNet, CAPANINA, USEHAAS and COST297/HAPCOS (Grace and Mohorcic 2011Grace D, Mohorcic M (2011) Broadband communications via high altitude platforms. Hoboken: John Wiley and Sons.). In the HeliNet Project, completed in 2003, the Politecnico di Torino prepared studies for a stratospheric UAV denominated HeliPlat with a wingspan of 73 m, total mass of 815 kg and payload of 100 kg (Romeo et al. 2004Romeo G, Frulla G, Cestino E, Corsino G (2004) HELIPLAT: design, aerodynamic, structural analysis of long-endurance solar-powered stratospheric platform. J Aircraft 41(6):1505-1520.). The Advanced Research in Telecommunications Systems (ARTES) Project, from the European Space Agency (ESA), completed in 2005, made an estimate that the development of 2 stratospheric platforms with solar electric propulsion (airplane and airship) would require total resources of 270 million euros (about 302 million dollars), over a 10-year period (ESA 2006European Space Agency (2006) Stratospheric platforms — a definition study for an ESA system; [accessed 2015 Dec 04]. https://artes.esa.int/projects/stratospheric-platforms-definition-study-esa-system
https://artes.esa.int/projects/stratosph...
).
There are private companies with proposals for HAP airships projects, but without confirmation of financial resources allocation for the development of these initiatives, such as: STRATXX (Switzerland), TAO Group (Germany), and RosAeroSystems (Russia).
BIBLIOMETRIC ANALYSIS
The bibliometric analysis of scientific publications is an important tool to support forecasting of new technologies (Daim et al. 2006Daim TU, Rueda G, Martin H, Gerdsri P (2006) Forecasting emerging technologies: use of bibliometrics and patent analysis. Technol Forecast Soc Change 73(8):981-1012. doi: 10.1016/j.techfore.2006.04.004
https://doi.org/10.1016/j.techfore.2006....
). In the present paper, these tools have been used to identify countries wich had more papers in the area of HAP and the temporal evolution of the scientific work, with the construction of logistic curves. The following databases were analyzed for searching scientific articles: Scopus, Web of Science and Google Scholar. Scopus was selected because it has generated the largest number of results. The following search criteria (query string) were adopted, applied in any of the fields: title, keywords or abstract — “high altitude platform” or “high altitude airship” or “high altitude long endurance” or “high altitude solar powered” or “high altitude aeronautical platform” or “high altitude pseudo satellite” or “stratospheric platform” or “stratospheric aircraft” or “stratospheric airship” or “stratospheric aerostat” or “stratospheric satellite” or “atmospheric satellite”.
In order to eliminate repetition and results without relation with the subject of this study, an analysis of each article abstract was performed. Publications were considered valid when they were directly related to the HAP subject. In addition to the papers in the field of aeronautics, articles on energy conversion, remote sensing, and telecommunications were also included. As an example of topics that meet the search criteria but are irrelevant in this paper, studies related to atmospheric sciences, microsatellites and conventional high-altitude UAV (HALE), as the Global Hawk, can be cited. Although this filtering procedure is prone to error, it is considered that the influence of these errors on the final quantitative results is small. About 30% of the publications obtained in the search were eliminated in this process.
After filtering, 1,220 scientific papers directly related HAP were identified in the period from January 1990 to December 2015. The average from 1968 to 1989 was about 1 publication per year, with a total of 22 publications, and, therefore, this period was not included in the survey. The total number of publications for each of the 5 countries with the largest number of papers was: China (348), US (242), Italy (117), UK (109) and Japan (90). Figure 16 shows, in a stacked chart, the distribution of scientific publications per year, for each of these 5 countries. From 2009, China becomes the country that publishes the largest number of scientific articles on HAP, while, in other countries, there was a decline in publications.
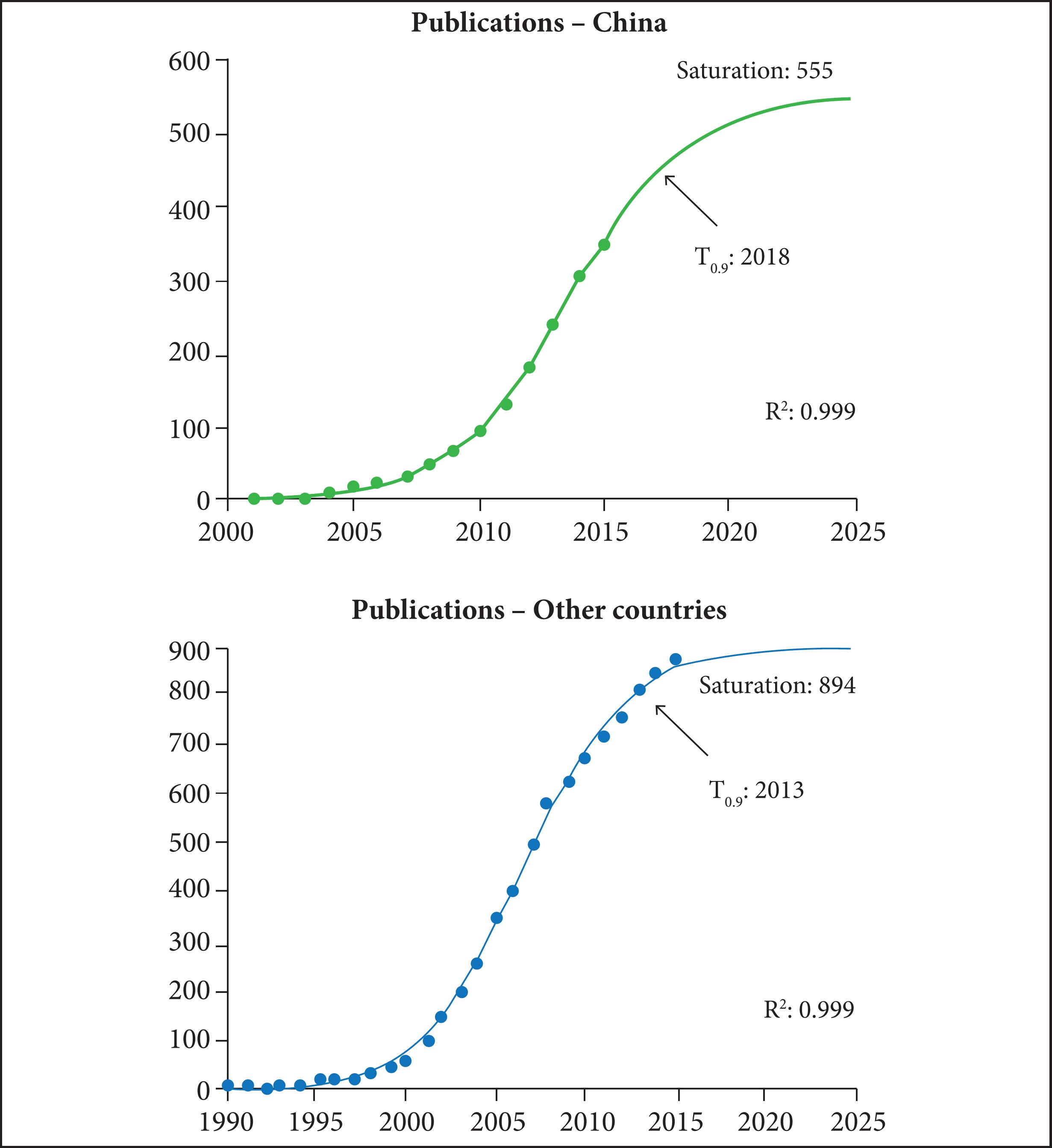
By using the Logistic Substitution Model 2 (LSM2) program, from the International Institute for Applied Systems Analysis (IIASA), the logistic curves for the growth in the number of published papers were calculated, in accumulated values, for China and other countries of the world (Fig. 17). In this survey of scientific articles, China publications previous to 2000 were not identified. From these logistics curves, it may be estimated that the saturation limit in China should be of 555 publications and, in other countries, of 894. The year to achieve 90% saturation in China is estimated in 2018 and, in other countries, in 2013. These estimations are valid provided that there are no significant changes in the current world scenario of HAPs, as a further increase in scientific interest in the subject due to expressive successful results of Google, Facebook, Airbus and Thales companies.
Of the total of 270 institutions of the articles authors, 90% were academic (universities), 6% research institutes (including governmental organizations), and 4% industries. Based on an analysis of abstracts, a classification of the papers was conducted in the following topics: type of HAP covered by the paper (airplane, airship or balloon), article specific on telecommunications and article with other issues, such as energy conversion and remote sensing. Table 1 presents the results of this classification for the total 1,220 articles and is also divided into China and other countries. It is worth mentioning that 58% of the publications on HAP in China are related to airships and 57% of the papers from other countries, to telecommunications area. Most of the articles related to balloons are on the StratoSail concept that a wing is suspended by a long cable attached to a stratospheric balloon, allowing a limited navigation capability for the balloon (Nock et al. 2002Nock KT, Heun MK, Aaron KM (2002) Global stratospheric balloon constellations. Adv Space Res 30(5):1233-1238. doi: 10.1016/S0273-1177(02)00528-8
https://doi.org/10.1016/S0273-1177(02)00...
).
Although a significant number of papers published in China on airships might indicate the existence of a centralized governmental orientation for the future development of a stratospheric airship, it was not found any reference to confirm this hypothesis. Some of the Chinese articles mention possible military applications for high-altitude airships, for example, as a platform for GPS signal jamming for defense against cruise missiles (Li et al. 2013Li M, Liu F, Yang J (2013) Quantity requirement analysis of stratospheric airship-carried GPS jammer. In: Du W, editor. Informatics and management science IV. London: Springer. p. 155-162. (Lecture Notes in Electrical Engineering; v. 207).).
TECHNOLOGICAL CHALLENGES
Designing aircraft to operate in the stratosphere as HAP imposes major technological challenges, with the main ones being: lightweight structures, energy generation and storage, thermal management, operation at low altitude and reliability. Some aspects of each of these challenges will be discussed next.
LIGHTWEIGHT STRUCTURES
At an altitude of 20 km, typical of HAPs operation, the air is rarefied, with a density of about 7% of the sea level. As the lift, both aerodynamic and aerostatic, which counteracts the weight of the aircraft, is directly proportional to the air density, the wing area in the case of airplanes and the volume in the case of airships and balloons, designed to operate as HAP, have to be about 14 times larger than if the aircraft were dimensioned to sea-level conditions, considering the same design features, such as total weight, aerodynamic shape and operation speed. These large dimensions lead to very severe optimization requirements of HAPs structural weight.
In the case of airships and balloons, the envelope material must have low weight characteristics, high strength, high ability to withstand damage (tear, pin holes), low permeability to lifting gas, maintain flexibility at low temperature and low degradation with UV radiation and ozone (Zhai and Euler 2005Zhai H, Euler A (2005) Material challenges for lighter-than-air systems in high altitude applications. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; [accessed 2015 Dec 04]. http://arc.aiaa.org/doi/pdf/10.2514/6.2005-7488
http://arc.aiaa.org/doi/pdf/10.2514/6.20...
). It is typically used laminated with an outer layer, for environmental protection and retention of gas, and internal fibers, for structural strength, joined by an adhesive layer. A typical HAP laminate has thickness of 0.16 mm and density per area of 130 g/m2 (Liu et al., 2015Liu LB, Cao S, Zhu M (2015) Mechanical characteristics of stratospheric airship envelope of vectran fibre-reinforced-laminated composite. Mater Res Innovat 19(Suppl 5):S5-606-S5-612. doi:10.1179/1432891714Z.0000000001162
https://doi.org/10.1179/1432891714Z.0000...
). As an example of the importance of the use of advanced materials for the envelope of high-altitude airships, it can be mentioned that the Japan SPF Project estimated that the mass of the structure corresponds to 52% of the total airship mass (Eguchi and Yokomaku 2000Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
https//repository.exst.jaxa.jp/dspace/bi...
).
Also for HAPs of the airplane category, lightweight structures are essential. A typical wing structure of a HAP airplane, as the Helios (Fig. 18), from AeroVironment, consists of tubular spar and ribs using composite material (carbon fiber), rigid foam leading edge and plastic film skin (Noll et al. 2007Noll TE, Ishmael SD, Henwood B, Perez-Davis ME, Tiffany GC, Madura J, Gaier M, Brown JM, Wierzbanowski T (2007) Technical findings, lessons learned, and recommendations resulting from the helios prototype vehicle mishap; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070022260.pdf
ntrs.nasa.gov/archive/nasa/casi.ntrs.nas...
).
Wing structure of Helios, AeroVironment (NASA 2015National Aeronautics and Space Administration (2015) Helios prototype flying wing image gallery; [accessed 2015 Dec 04]. https://www.nasa.gov/centers/armstrong/multimedia/imagegallery/Helios/index.html
https://www.nasa.gov/centers/armstrong/m... ).
The weight of various components of a HAP airplane is distributed along the wingspan to reduce the structural stress on the wing. As an example, on the Zephyr, the batteries are installed in the wing spar (Rapinett 2009Rapinett A (2009) Zephyr : a high altitude long endurance unmanned air vehicle (Master’s thesis). Guildford: University of Surrey; [accessed 2015 Dec 04]. personal.ph.surrey.ac.uk/~phs1pr/mphys-dissertations/2009/Rapinett-MPhys09.pdf
personal.ph.surrey.ac.uk/~phs1pr/mphys-d...
). One of the technologies required for the design of these large and very flexible wings is analysis of aeroelastic phenomena, such as flutter, and its influence on the stability and control of the airplane.
These optimized structures for high-altitude flights have the disadvantage of fragility at gust conditions found at lower altitudes. Examples of this weakness are the accidents of Helios in 2003 and Solara 50 in 2015.
ENERGY GENERATION AND STORAGE
Like any aircraft, HAPs require a source of energy for the propulsion system and the electricity supply to their systems and payload. HAP projects with the objective of achieving very long endurance, on the order of months and even years, prevent the use of energy sources based on traditional aviation fuel, as avgas (aviation gasoline) or jet fuel (aviation kerosene), and other less common fuels, such as diesel or hydrogen. Nuclear power is a technically feasible solution, but politically not acceptable by society, because of the associated risks (Sweetman 2012Sweetman B (2012). Benefits of Nuclear UAVs. Defense Technology International; [accessed 2015 Dec 04]. aviationweek.com/awin/benefits-nuclear-uavs
aviationweek.com/awin/benefits-nuclear-u...
). The potential for power transmition to the aircraft from ground stations, via microwave or laser, has been studied, but it is still far from being operationally viable (Dickinson 2013Dickinson RM (2013) Power in the sky. IEEE Microw Mag (March/April):36-47. doi: 10.1109/MMM.2012.2234632
https://doi.org/10.1109/MMM.2012.2234632...
). Currently, the main source of energy generation considered for HAPs is the Sun (Zhu et al. 2014Zhu X, Guo Z, Hou Z (2014) Solar-powered airplanes: a historical perspective and future challenges. Progr Aero Sci 71:36-53. http://doi.org/10.1016/j.paerosci.2014.06.003
http://doi.org/10.1016/j.paerosci.2014.0...
).
The most commonly adopted solution for very long endurance HAP is, during the day, the solar energy converted into electricity by means of photovoltaic cells (solar cells), and part of this electricity is used to charge a storage system, usually rechargeable batteries or RFC for later use at night (Nickol and Guynn 2007Nickol CL, Guynn MD (2007) High altitude long endurance air vehicle analysis of alternatives and technology requirements development. Proceedings of the 45th AIAA Aerospace Science Meeting and Exhibit; Reno, USA.).
The use of RFC on HAP, although with promising advantages, has been one of the major technological challenges. In Japan, research for the SPF airship defined as a target for the RFC system achieving a specific energy of 450 Wh/kg. The current systems have 350 Wh/kg of specific energy (Okaya and Shinozaki 2011Okaya S, Shinozaki N (2011) R&D status of RFC technology for SPF airship in Japan. Proceedings of the 9th Annual International Energy Conversion Engineering Conference; San Diego, USA.).
THERMAL MANAGEMENT
The lighter-than-air (LTA) aircraft are directly influenced by the temperature difference between the lifting gas and the external atmosphere. This effect is called superheating, when the temperature of the internal gas is higher than that of external air, or supercooling, in the opposite case (Harada et al. 2003Harada K, Eguchi K, Sano M, Sasa S (2003) Experimental study of thermal modeling for stratospheric platform airships. Proceedings of the AIAA’s 3rd Annual Aviation Technology, Integration, and Operations (ATIO) Forum; Denver, USA.). This difference of temperature may be caused by several factors, such as direct solar radiation, solar radiation reflection on Earth’s surface or clouds (albedo), expansion of the lifting gas during climbing or compression in descent, changes in atmospheric temperature (day/night) and warming caused by operation of photovoltaic cells (Yao et al. 2014Yao W, Lu X, Wang C, Ma R (2014) A heat transient model for the thermal behavior prediction of stratospheric airships. Appl Therm Eng 70(1):380-387. doi: 10.1016/j.applthermaleng.2014.05.050
https://doi.org/10.1016/j.applthermaleng...
). The influence can be in aerostatic lifting force or internal pressure, in the case of superpressure airships. The thermal management of HAP airships, including the mathematical modeling of the thermal balance and the use of insulating materials, is a technology that needs to be intensified (Wu et al. 2015Wu J, Fang X, Wang Z, Hou Z, Ma Z, Zhang H, Dai Q, Xu Y (2015) Thermal modeling of stratospheric airships. Progr Aero Sci 75:26-37. http://doi.org/10.1016/j.paerosci.2015.04.001
http://doi.org/10.1016/j.paerosci.2015.0...
).
OPERATION AT LOW ALTITUDE
The HAP projects, both airplanes and airships, are optimized for the stratosphere conditions, at altitudes close to 20 km, where the thin air is relatively calm and the wind speed is low (Jamison et al. 2005Jamison L, Sommer GS, Porche III IR (2005) High-altitude airships for the future Force Army. RAND Corporation; [accessed 2015 Dec 04]. www.rand.org/pubs/technical_reports/TR234.html
www.rand.org/pubs/technical_reports/TR23...
). As result, HAPs have low power propulsion systems and light and fragile structures, when compared to aircraft designed to operate at lower altitudes. The strong winds and turbulence found in the troposphere can lead to loss of the HAP, such as the accidents of Helios in 2003 and Solara 50 in 2015. Therefore, an important point in the HAPs operation at low altitude, especially in phases of launch and recovery, is the choice of weather windows where the weather conditions are appropriate (Brooke 2005Brooke L (2005) High altitude LTA platforms: capabilities and possibilities. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; Arlington, USA.). An example of these limitations is that, for the operation of Zephyr, it is chosen calm weather conditions, such as those found in desert regions (Rapinett 2009Rapinett A (2009) Zephyr : a high altitude long endurance unmanned air vehicle (Master’s thesis). Guildford: University of Surrey; [accessed 2015 Dec 04]. personal.ph.surrey.ac.uk/~phs1pr/mphys-dissertations/2009/Rapinett-MPhys09.pdf
personal.ph.surrey.ac.uk/~phs1pr/mphys-d...
). The domain of technologies for weather forecasting in the operations area and for simulation of the aircraft trajectory at the conditions found at low altitude is essential to the successful operation of HAPs.
Another important aspect to be considered in HAP operations is the coordination with the airspace control organizations. Most of the time of flight of a HAP is above the air control altitude limit, usually defined at 20 km (65,000 ft). The launch and recovery phases, which occur at lower altitudes, should be planned in conjunction with the airspace control agency, with the definition of specific segregated areas for that operation. The integration of unmanned aircraft in not segregated airspace is a subject not yet regulated, mainly due to the issue of avoiding air collisions (“sense and avoid”). Aspects in the field of international law related to the overflight of other countries also need to be analyzed.
RELIABILITY
HAP operation by long flight periods, for months or even years, will require equipments with a high level of reliability (Bolkcom 2004Bolkcom C (2004) Potential military use of airships and aerostats. CRS Report for Congress; [accessed 2015 Dec 04]. http://opencrs.com/document/RL31873/2004-03-16/download/1005/
http://opencrs.com/document/RL31873/2004...
). In the definition of HAP equipment, it should be considered that the environment in the stratosphere has aspects similar to the space, such as very low temperatures, marked temperature cycles (day/night) and intense solar radiation and UV (Keck Institute for Space Studies 2014Keck Institute for Space Studies (2014) Airships: a new horizon for science; [accessed 2015 Dec 04]. www.kiss.caltech.edu/study/airship/
www.kiss.caltech.edu/study/airship/...
). Another important point is that the low pressure at high altitudes can cause arcing problems in electrical components (Ferguson and Hillard 2004Ferguson DC, Hillard GB (2004) Paschen considerations for high altitude airships. Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit; Reno, USA.). For an operational HAP, it is likely that space equipments and components are adopted, usually of very high cost. The high-reliability issues must be applied even to the HAP system as a whole, including ground stations and data link. The methods used to perform reliability analysis, as Failure Mode, Effects and Criticality Analysis (FMECA), should be adapted to the specific case of HAP systems.
TECHNOLOGY TRENDS
Based on the evolution of HAP projects and the current state-of-the-art of its technologies, it is possible to perform an analysis of technology trends in this area. Most of the current projects are of UAVs, due to the goal of achieving very-long-duration flights. This trend should be increasingly strengthened.
For these long flights, it is expected to increase the use of solar cell panels (photovoltaic cells) as the primary energy source of HAPs. For nighttime, it is unclear whether there will be a preference for advanced rechargeable batteries, such as lithium-sulfur, or RFC. These two technologies are expected to have significant advances in the coming years due to the evolution of electric car industry.
In the military market, the decline of US involvement in the conflicts in Iraq and Afghanistan motivated the stop of HAP projects managed by the DoD, as in HAA, ISIS and Vulture Programs.
Among the HAP developments underway with better prospects for continuity allocation of financial resources, there are three airplane projects (Google’s Solara 50, Facebook’s Aquila and Airbus’ Zephyr), only one airship (Thales’ Stratobus) and one balloon (Google’s Loon). This predominance of airplane projects does not seem to be a confirmed trend for medium and long term. The number of technical publications in China on HAP airships may be an indication that airships will still be a significant segment of future HAP projects.
Analyzing the information on the 12 major HAP projects, presented in this paper, it is noticed that 7 were closed without achieving results that would ensure continuity and 5 are in progress (Airbus Zephyr, Thales Stratobus, Google Loon, Google Solara 50 and Facebook Aquila). This finding indicates that the technological maturity (Technology Readiness Level — TRL) for the development of HAP aircraft has not reached a level sufficiently high to ensure their certification, serial production and commercial operation. At present, the technological risks involved in developing HAP are very high.
CONCLUSIONS
The advantages of HAPs, if confirmed, indicate a good probability of being adopted mainly in the telecommunications market. The excitement about the concept, emerged in the early 2000s, did not materialize. Several projects that looked very promising, as airships in Japan and South Korea and ERAST airplanes in the US, did not have continuity. In the military arena, the decline of US involvement in the conflicts in Iraq and Afghanistan led to the halt of Department of Defense HAP projects. The occurrence of accidents, such as the Helios in 2003 and the HALE-D in 2011, as well as project closure serve as an alert to the fact that technologies related to HAPs are still in a lown level of maturity (TRL).
Several technological challenges still need to be overcome, such as: lightweight structures, energy storage with RFC, airships thermal management, operation at low altitude, and increase in system reliability.
The bibliometric analysis showed that, by 2009, countries that most published on HAP were US, Italy, UK and Japan. Currently, China has been the main generator of scientific articles in HAP area, with emphasis on airships.
From 2013, Airbus Defence and Space, Thales Alenia Space, Google and Facebook began investing in HAP projects mainly aimed to supply Internet in areas without telecommunications infrastructure, bringing new hope to achieve the establishment of a HAP industry. The future of HAPs will be driven mainly by the evolution of technologies of potential competitors, such as microsatellites constellations, and the availability of financial resources to overcome the HAP technological challenges.
REFERENCES
- Aerospace Technology (2013) Solara 50 Atmospheric Satellite; [accessed 2015 Dec 04]. http://www.aerospace-technology.com/projects/solara-50-atmospheric-satellite/
» http://www.aerospace-technology.com/projects/solara-50-atmospheric-satellite/ - Airbus Defence and Space (2016) United Kingdon Ministry of Defence places order for two solar-powered Airbus Zephyr 8s; [accessed 2016 May 02]. http://www.airbusgroup.com/int/en/news-media/press-releases/Airbus-Group/Financial_Communication/2016/02/20160218_airbus_defence_and_space_zephyr_uk.html
» http://www.airbusgroup.com/int/en/news-media/press-releases/Airbus-Group/Financial_Communication/2016/02/20160218_airbus_defence_and_space_zephyr_uk.html - Amos J (2010) ‘Eternal plane’ returns to Earth. BBC News; [accessed 2015 Dec 04]. http://bbc.co.uk/news/science-environment-10733998
- Androulakakis SP, Judy RA (2013) Status and plans of High Altitude Airship (HAA) Program. Proceedings of the AIAA Lighter-Than-Air Systems Technology (LTA) Conference; Dayton Beach, USA.
- Arthur B, Michel H (2015) High-altitude drones. Center for the Study of the Drone; [accessed 2015 Dec 04]. http://dronecenter.bard.edu/high-altitude-drones/
- Bang H, Lee S, Lee H (2008) Nonlinear trajectory tracking using vectorial backstepping approach. Proceedings of the 2008 International Conference on Control, Automation and Systems (ICCAS 2008);Seoul; South Korea.
- Boeing (2013) Solar Eagle; [accessed 2015 Dec 04]. www.boeingimages.com/C.aspx?VP3=SearchResult&VBID=2JRSN2DOWLAO2
- Bolkcom C (2004) Potential military use of airships and aerostats. CRS Report for Congress; [accessed 2015 Dec 04]. http://opencrs.com/document/RL31873/2004-03-16/download/1005/
» http://opencrs.com/document/RL31873/2004-03-16/download/1005/ - Brooke L (2005) High altitude LTA platforms: capabilities and possibilities. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; Arlington, USA.
- Brown N (2015) Light fantastic : Airbus details Zephyr development plans. Jane’s International Defence Review; [accessed 2016 May 02]. https://janes.ihs.com/InternationalDefenceReview/DisplayFile/idr17957?edition=2015
» https://janes.ihs.com/InternationalDefenceReview/DisplayFile/idr17957?edition=2015 - Colker D (2000) An idea that just took off. Los Angeles Times; [accessed 2015 Dec 04]. http://articles.latimes.com/print/2000/jun/11/business/fi-39796
» http://articles.latimes.com/print/2000/jun/11/business/fi-39796 - Colozza A (2003) Initial feasibility assessment of a high altitude long endurance airship. Analex Corporation. NASA/CR-2003-212724; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040021326.pdf
» ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040021326.pdf - Daim TU, Rueda G, Martin H, Gerdsri P (2006) Forecasting emerging technologies: use of bibliometrics and patent analysis. Technol Forecast Soc Change 73(8):981-1012. doi: 10.1016/j.techfore.2006.04.004
» https://doi.org/10.1016/j.techfore.2006.04.004 - Defense Advanced Research Projects Agency (2009) Vulture II Special Notice. DARPA-SN-09-41; [accessed 2015 Dec 04]. https://www.fbo.gov/utils/view?id=81a4a506912acdadd6929b7629f1a4d9
» https://www.fbo.gov/utils/view?id=81a4a506912acdadd6929b7629f1a4d9 - Defense Daily (2013) DARPA plans venture energy subsystem flight-like ground test in 2015; [accessed 2015 Dec 04]. http://www.defensedaily.com/darpa-plans-venture-energy-subsystem-flight-like-ground-test-in-2015/
» http://www.defensedaily.com/darpa-plans-venture-energy-subsystem-flight-like-ground-test-in-2015/ - Defense Industry Daily (2010) DARPA’s Vulture: what goes up, needn’t come down; [accessed 2015 Dec 04]. http://www.defenseindustrydaily.com/DARPAs-Vulture-What-Goes-Up-Neednt-Come-Down-04852/
» http://www.defenseindustrydaily.com/DARPAs-Vulture-What-Goes-Up-Neednt-Come-Down-04852/ - Dickinson RM (2013) Power in the sky. IEEE Microw Mag (March/April):36-47. doi: 10.1109/MMM.2012.2234632
» https://doi.org/10.1109/MMM.2012.2234632 - Eguchi K, Yokomaku Y (2000) 2000 Overview of stratospheric platform airship R&D program in Japan. 2nd Stratospheric Platform Systems Workshop, 12-15; [accessed 2015 Dec 04]. https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf
» https//repository.exst.jaxa.jp/dspace/bitstream/a-is/24606/1/nalrp2001003.pdf - European Space Agency (2006) Stratospheric platforms — a definition study for an ESA system; [accessed 2015 Dec 04]. https://artes.esa.int/projects/stratospheric-platforms-definition-study-esa-system
» https://artes.esa.int/projects/stratospheric-platforms-definition-study-esa-system - Federal Business Opportunities (2008) Award Notice BAA 07-51 — Vulture Program; [accessed 2015 Dec 04]. https://www.fbo.gov/?s=opportunity&mode=form&tab=core&id=5bffbe1738e2769b8e8b99d8e6e29b2e&_cview=0
» https://www.fbo.gov/?s=opportunity&mode=form&tab=core&id=5bffbe1738e2769b8e8b99d8e6e29b2e&_cview=0 - Ferguson DC, Hillard GB (2004) Paschen considerations for high altitude airships. Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit; Reno, USA.
- Google (2016) Project Loon; [accessed 2016 May 02]. https://plus.google.com/+ProjectLoon/posts/HaRocUbUSae
» https://plus.google.com/+ProjectLoon/posts/HaRocUbUSae - Government Accountability Office (2012) Future aerostat and airship investment decisions drive oversight and coordination needs. Report GAO-13-81.
- Grace D, Mohorcic M (2011) Broadband communications via high altitude platforms. Hoboken: John Wiley and Sons.
- Harada K, Eguchi K, Sano M, Sasa S (2003) Experimental study of thermal modeling for stratospheric platform airships. Proceedings of the AIAA’s 3rd Annual Aviation Technology, Integration, and Operations (ATIO) Forum; Denver, USA.
- Hempel J (2016) India bans Facebook’s basics app to support net neutrality; [accessed 2016 May 02]. http://www.wired.com/2016/02/facebooks-free-basics-app-is-now-banned-in-india/
» http://www.wired.com/2016/02/facebooks-free-basics-app-is-now-banned-in-india/ - IHS (2015) Vulture Program. Jane’s unmanned aerial vehicles and targets; [accessed 2016 May 02]. https://janes.ihs.com/UnmannedAerial/Display/1318705
» https://janes.ihs.com/UnmannedAerial/Display/1318705 - Jamison L, Sommer GS, Porche III IR (2005) High-altitude airships for the future Force Army. RAND Corporation; [accessed 2015 Dec 04]. www.rand.org/pubs/technical_reports/TR234.html
» www.rand.org/pubs/technical_reports/TR234.html - Jin-Young C (2015) Solar-powered UAV succeeds in flying 14 km above sea level. Business Korea; [accessed 2016 May 02]. http://www.businesskorea.co.kr/english/news/sciencetech/11694 -flying-high-solar-powered-uav-succeeds-flying-14-km-above-sea-level
» http://www.businesskorea.co.kr/english/news/sciencetech/11694 -flying-high-solar-powered-uav-succeeds-flying-14-km-above-sea-level - Karapantazis S, Pavlidou FN (2005) Broadband communications via high-altitude platforms: a survey. IEEE Communications Surveys and Tutorials 7(1):2-31. doi: 10.1109/COMST.2005.1423332
» https://doi.org/10.1109/COMST.2005.1423332 - Keck Institute for Space Studies (2014) Airships: a new horizon for science; [accessed 2015 Dec 04]. www.kiss.caltech.edu/study/airship/
» www.kiss.caltech.edu/study/airship/ - Korn AO (1974) Unmanned powered balloons. Proceedings of the 8th AFCRL Scientific Balloon Symposium; Hyannis, USA; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a003398.pdf
» www.dtic.mil/dtic/tr/fulltext/u2/a003398.pdf - Lee HJ (2006) R&D on HAPs in Korea. ETRI; [accessed 2015 Dec 04]. www.capanina.org/yorkhapweek/DOCS/HAS-WP-4.pdf
» www.capanina.org/yorkhapweek/DOCS/HAS-WP-4.pdf - Lee M, Smith S, Androulakakis S (2009) The high altitude lighter-than-air airship efforts at the US Army Space and Missile Defense Command/Army Forces Strategic Command. Proceedings of the 18th AIAA Lighter-Than-Air Systems Technology Conference; Seatle, USA.
- Lee S, Jang J, Ryu H, Lee KH (2014) Matching trajectory optimization and nonlinear tracking control for HALE. Adv Space Res 54(9):1870-1887. doi: 10.1016/j.asr.2014.07.007
» https://doi.org/10.1016/j.asr.2014.07.007 - Lee YG, Kim DM, Yeom CH (2006) Development of Korean high altitude platform systems. Int J Wireless Inform Network 13(1):31-42. doi: 10.1007/s10776-005-0018-6
» https://doi.org/10.1007/s10776-005-0018-6 - Levine J (2004) The promise of ERAST; [accessed 2015 Dec 04]. http://nasa.gov/centers/dryden/news/X-Press/stories/102904_people_erast.html
» http://nasa.gov/centers/dryden/news/X-Press/stories/102904_people_erast.html - Li M, Liu F, Yang J (2013) Quantity requirement analysis of stratospheric airship-carried GPS jammer. In: Du W, editor. Informatics and management science IV. London: Springer. p. 155-162. (Lecture Notes in Electrical Engineering; v. 207).
- Liu LB, Cao S, Zhu M (2015) Mechanical characteristics of stratospheric airship envelope of vectran fibre-reinforced-laminated composite. Mater Res Innovat 19(Suppl 5):S5-606-S5-612. doi:10.1179/1432891714Z.0000000001162
» https://doi.org/10.1179/1432891714Z.0000000001162 - Mecrow BC, Bennett JW, Jack AG, Atkinson DJ, Freeman AJ (2010) Drive topologies for solar-powered aircraft. IEEE Trans Ind Electron 57(1):457-464. doi: 10.1109/TIE.2009.2031190
» https://doi.org/10.1109/TIE.2009.2031190 - Metz R (2015) Project Loon head details how the balloons interact. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/537956/emtch-digital-project-loon-head-details-how-the-balloons-interact/
» https://www.technologyreview.com/s/537956/emtch-digital-project-loon-head-details-how-the-balloons-interact/ - Nakadate M (2005) Development and flight test of SPF-2 Low Altitude Stationary Flight Test Vehicle. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; Arlington, USA.
- National Aeronautics and Space Administration (2004) Helios — project description; [accessed 2015 Dec 04]. http://www.nasa.gov/centers/dryden/multimedia/imagegallery/Helios/Helio_proj_desc.html
» http://www.nasa.gov/centers/dryden/multimedia/imagegallery/Helios/Helio_proj_desc.html - National Aeronautics and Space Administration (2015) Helios prototype flying wing image gallery; [accessed 2015 Dec 04]. https://www.nasa.gov/centers/armstrong/multimedia/imagegallery/Helios/index.html
» https://www.nasa.gov/centers/armstrong/multimedia/imagegallery/Helios/index.html - National Transportation Safety Board (2015) DCA15CA117 — Solara 50 accident; [accessed 2015 Dec 04]. http://www.ntsb.gov/_layouts/ntsb.aviation/brief.aspx?ev_id=2015050X854108&key=1
» http://www.ntsb.gov/_layouts/ntsb.aviation/brief.aspx?ev_id=2015050X854108&key=1 - Nickol CL, Guynn MD (2007) High altitude long endurance air vehicle analysis of alternatives and technology requirements development. Proceedings of the 45th AIAA Aerospace Science Meeting and Exhibit; Reno, USA.
- Nock KT, Heun MK, Aaron KM (2002) Global stratospheric balloon constellations. Adv Space Res 30(5):1233-1238. doi: 10.1016/S0273-1177(02)00528-8
» https://doi.org/10.1016/S0273-1177(02)00528-8 - Noll TE, Ishmael SD, Henwood B, Perez-Davis ME, Tiffany GC, Madura J, Gaier M, Brown JM, Wierzbanowski T (2007) Technical findings, lessons learned, and recommendations resulting from the helios prototype vehicle mishap; [accessed 2015 Dec 04]. ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070022260.pdf
» ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20070022260.pdf - Okaya S, Shinozaki N (2011) R&D status of RFC technology for SPF airship in Japan. Proceedings of the 9th Annual International Energy Conversion Engineering Conference; San Diego, USA.
- Onda M, Sano M (2006) Test vehicle proposal to next Japanese stratospheric LTA developments. Proceedings of the 6th AIAA Aviation Technology, Integration and Operations (ATIO) Conference; Wichita, USA.
- Rapinett A (2009) Zephyr : a high altitude long endurance unmanned air vehicle (Master’s thesis). Guildford: University of Surrey; [accessed 2015 Dec 04]. personal.ph.surrey.ac.uk/~phs1pr/mphys-dissertations/2009/Rapinett-MPhys09.pdf
» personal.ph.surrey.ac.uk/~phs1pr/mphys-dissertations/2009/Rapinett-MPhys09.pdf - Romeo G, Frulla G, Cestino E, Corsino G (2004) HELIPLAT: design, aerodynamic, structural analysis of long-endurance solar-powered stratospheric platform. J Aircraft 41(6):1505-1520.
- Simonite T (2015a) Project Loon. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/534986/project-loon/
» https://www.technologyreview.com/s/534986/project-loon/ - Simonite T (2015b) Meet Facebook’s stratospheric Internet drone. MIT Technology Review; [accessed 2015 Dec 04]. https://www.technologyreview.com/s/539756/meet-facebooks-stratospheric-internet-drone/
» https://www.technologyreview.com/s/539756/meet-facebooks-stratospheric-internet-drone/ - Smith MS, Rainwater EL (2003) Applications of scientific ballooning technology to high altitude airships. Proceedings of the 3rd AIAA Annual Aviation Technology, Integration, and Operations (ATIO) Forum; Denver, USA; [accessed 2015 Dec 04]. arc.aiaa.org/doi/pdf/10.2514/6.2003-6711
» arc.aiaa.org/doi/pdf/10.2514/6.2003-6711 - Smith S, Fortenberry M, Michael L, Judy R (2011) HiSentinel80: flight of a high altitude airship. Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference; Virginia Beach, USA.
- Stevenson B (2015) Pseudo satellite warms up for market — Zephyr. Flight International 187(5484): 25-25.
- Stevenson B (2016) Twin-tailed Airbus Zephyr completes maiden flight. Flight Global; [accessed 2016 May 06]. https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/
» https://www.flightglobal.com/news/articles/twin-tailed-airbus-zephyr-completes-maiden-flight-424873/ - Sweetman B (2012). Benefits of Nuclear UAVs. Defense Technology International; [accessed 2015 Dec 04]. aviationweek.com/awin/benefits-nuclear-uavs
» aviationweek.com/awin/benefits-nuclear-uavs - Sweetman B (2013) Hard times for long-endurance vehicles. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin/hard?times?long?endurance?vehicles
» http://aviationweek.com/awin/hard?times?long?endurance?vehicles - Thales Alenia Space (2015) Thales: all about Stratobus; [accessed 2015 Dec 04]. http://www.thalesgroup.com/en/worldwide/space/magazine/space-qa-all-about-stratobus
» http://www.thalesgroup.com/en/worldwide/space/magazine/space-qa-all-about-stratobus - Thales Alenia Space (2016a) Stratobus; [accessed 2016 May 02]. https://www.thalesgroup.com/en/worldwide/space/news/new-video-stratobus-we-go
» https://www.thalesgroup.com/en/worldwide/space/news/new-video-stratobus-we-go - Thales Alenia Space (2016b) Stratobus project takes off! Press Release; [accessed 2016 May 02]. https://www.thalesgroup.com/sites/default/files/asset/document/pr_stratobus_kick_off_20160426_en_0.pdf
» https://www.thalesgroup.com/sites/default/files/asset/document/pr_stratobus_kick_off_20160426_en_0.pdf - Tung L (2016) Google’s Project Loon: now its Internet-beaming balloon tests take off in Sri Lanka; [accessed 2016 May 02]. http://www.zdnet.com/article/googles-project-loon-now-its-internet-beaming-balloon-tests-take-off-in-sri-lanka/
» http://www.zdnet.com/article/googles-project-loon-now-its-internet-beaming-balloon-tests-take-off-in-sri-lanka/ - US Department of Defense (2012) Summary Report of DoD Funded Ligther-Than-Air Vehicles. Ligther-than-air vehicles. Office of the Assistant Secretary of Defense for Research and Engineering; [accessed 2015 Dec 04]. www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf
» www.dtic.mil/dtic/tr/fulltext/u2/a568211.pdf - US Department of Defense (2015) RDT&E budget item justification: PB 2016 Air Force. PE 0305205F Endurance Unmanned Aerial Vehicles; [accessed 2015 Dec 04]. http://www.dtic.mil/descriptivesum/Y2016/AirForce/stamped/0305205F_7_PB_2016.pdf
» http://www.dtic.mil/descriptivesum/Y2016/AirForce/stamped/0305205F_7_PB_2016.pdf - Von Ehrenfried M (2014) Stratonauts: pioneers venturing into the stratosphere. Berlin: Springer International Publishing.
- Wang WQ (2011) Near-space remote sensing: potential and challenges. Berlin: Springer.
- Warwick G (2013) VLJ Pioneer bets on Atmosat UAV market. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin/vlj-pioneer-bets-atmosat-uav-market
- Warwick G (2014) Facebook joins Google in race to connect the world. Aviation Week and Space Technology; [accessed 2015 Dec 04]. http://aviationweek.com/awin-only/facebook-joins-google-race-connect-world
» http://aviationweek.com/awin-only/facebook-joins-google-race-connect-world - Warwick G (2015) Google perseveres after Titan UAV crash. Aerospace Daily and Defense Report; [accessed 2015 Dec 04]. http://aviationweek.com/technology/google-perseveres-after-titan-uav-crash
» http://aviationweek.com/technology/google-perseveres-after-titan-uav-crash - Widiawan AK, Tafazolli R (2006) High Altitude Platform Station (HAPS): a review of new infrastructure development for future wireless communications. Wireless Pers Comm 42(3):387-404. doi: 10.1007/s11277-006-9184-9
» https://doi.org/10.1007/s11277-006-9184-9 - Wu J, Fang X, Wang Z, Hou Z, Ma Z, Zhang H, Dai Q, Xu Y (2015) Thermal modeling of stratospheric airships. Progr Aero Sci 75:26-37. http://doi.org/10.1016/j.paerosci.2015.04.001
» http://doi.org/10.1016/j.paerosci.2015.04.001 - Yao W, Lu X, Wang C, Ma R (2014) A heat transient model for the thermal behavior prediction of stratospheric airships. Appl Therm Eng 70(1):380-387. doi: 10.1016/j.applthermaleng.2014.05.050
» https://doi.org/10.1016/j.applthermaleng.2014.05.050 - Zhai H, Euler A (2005) Material challenges for lighter-than-air systems in high altitude applications. Proceedings of the 5th AIAA Aviation, Technology, Integration, and Operations (ATIO) Conference; [accessed 2015 Dec 04]. http://arc.aiaa.org/doi/pdf/10.2514/6.2005-7488
» http://arc.aiaa.org/doi/pdf/10.2514/6.2005-7488 - Zhu X, Guo Z, Hou Z (2014) Solar-powered airplanes: a historical perspective and future challenges. Progr Aero Sci 71:36-53. http://doi.org/10.1016/j.paerosci.2014.06.003
» http://doi.org/10.1016/j.paerosci.2014.06.003
Publication Dates
-
Publication in this collection
Jul-Sep 2016
History
-
Received
24 May 2016 -
Accepted
08 June 2016