Abstract
The influence of the frecuency content of seismic excitations on the behavior of an optimal tuned mass damper (TMD) is studied in the context of a system with explicit consideration of soil-structure interaction. A stochastic analysis is made in the time domain for two random processes, one considering a broad bandwidth process (BBP) and other considering a narrow bandwidth process (NBP). A structure built over three different types of soil (soft, medium and hard) is considered. For the optimization of the TMD, the minimization of the ratio between the standard deviation of the displacement of the main structure with TMD with respect to a structure without TMD, is used as the target function. It is found that for seismic excitations with high frecuency content, the ratio of the TMD frequencies compared to the fixed base frequency of the structure approaches to 1 as the soil becomes more rigid. It is also observed that the TMD become tuned with the flexible base frequency for all soil types, producing perfect tuning for small mass ratios and detuning gradually for higher mass ratios. On the other hand, the TMD optimal damping ratio increases as the TMD mass ratio is higher, independently of the soil type. The TMD is more efficient for higher values of the TMD mass ratios, especially on soft soil. In structures built over flexible base, that are subjected to low frequency content excitations, the optimal TMD is tuned with the flexible base, independently of the type of soil and the fixed base period of the main structure. The TMD optimal damping is not sensitive to the flexible period for small mass ratios, and reaches its minimum value when it matches with the predominant period of the seismic event. On the other hand, the TMD reaches its maximum efficiency when it is tuned with the flexible period of the soil-structure system, and coincides with the predominant period of the seismic exitation and is higher on soft soil. A deterministic analysis is made using two seismic records, an artificial earthquake compatible with the Chilean code NCh2745 characterized by high frequencies content and other similar to the event in 1985 in Mexico, characterized by low frequencies content. It is seen that the optimal TMD is efficient controlling the response of the structure in all types of soil analyzed.
Keywords
Tuned mass damper; soil-structure interaction; seismic excitation frequency content; optimization of dynamic systems
1 INTRODUCTION
One of the main objectives of structural design is to provide safety and serviceability to the users. This is done, fundamentally, by controlling the response of structures subjected to dynamic excitations. One of the structural control systems used currently, are tuned mass dampers (TMD). The first studies on the behavior of TMD were made by Den Hartog in 1947Den Hartog, J. P. (1947). Mechanical Vibrations. New York: McGraw-Hill., who determined the TMD design parameters to control a one degree of freedom system subjected to harmonic excitation (Den Hartog, 1947).
Later, research focused on the optimization of the design parameters and evaluation of the TMD performance in reducing vibrations of structures subjected to different types of dynamic excitations.
In most of the investigations considered, the use of TMD in fixed base structures ignored the effect of the soil-structure interaction (SSI), however, there are studies where the influence of the soil type has been considered. Among these is that of Xu and Kwok (1992Xu Y.L. and Kwok V. (1992). Wind-induced response of soil-structure-damper systems. Journal of Wind Engineering and Industrial Aerodynamics, pp. 2057-2068.) who observed that the response of structures subjected to wind excitations, built on soft soil, is greatly influenced by the SSI effect and the TMD cannot effectively reduce the response of the system. On the other hand, when the soil is moderately rigid, the TMD are tuned with the frequency of the soil-structure system and not the frequency of the fixed base structure. Gao et al. (1996Gao H., Samali B. and Kwok K.C.S. (1996). Structural vibration control by passive dampers considering soil-structure interaction. Proc. 2nd Int. Workshop on Structural Control, HJUST, Hong Kong, pp. 174-185.) analyze the TMD behavior when facing seismic excitations and conclude that they are as efficient in the control of a soil-structure system as in the fixed base structures, as long as the soil-structure fundamental frequency is accurately estimated for the damper tuning. Wu et al (1999Wu J., Chen G. and Lou M. (1999). Seismic effectiveness of tuned mass dampers considering soil-structure interaction. Earthquake Engineering & Structural Dynamics, pp. 1219-1233.) studied how the SSI affects the TMD seismic behavior when they are installed in flexible base structures. In this study, a structure is subjected to a stationary random excitation and the root mean square of the controlled response was compared to an uncontrolled system to measure the TMD performance. They determined that the optimal TMD is tuned with the flexible base frequency. In addition, a strong SSI can modify the damping characteristics of the structure, which at the same time affect the TMD performance, which is why the damper efficiency reduces as the soil gets softer.
Ghosh and Basu (2004Ghosh & B. Basu. (2004). Effect of soil interaction on the performance of tuned mass dampers for seismic applications. Journal of Sound and Vibration, pp. 1079-1090.) investigated in the frequency domain, the effects of the SSI on the TMD-operation to control seismic vibrations. They observed that in the tuning process, the influence of the soil must be considered, because if this effect is ignored, the TMD design can have a device which causes an increase in the structure response. A damping must also be provided in the TMD, greater than the critical damping, to guarantee the reduction of the response. Khoshnoudian et al. (2015Khoshnoudian F., Ayyobi P., Paytam P. and. Mirmo'azen. M. (2015). Genetic Algorithm design of a soil-structure-damper system. Structures and Buildings, pp. 593-607.) worked in the optimal design of a TMD, considering SSI, by using a multi-objective genetic algorithm optimizer, which considers the simultaneous minimization of the displacements, velocities and accelerations of each storey; this algorithm provided an optimal design of the TMD which considerably reduced the maximum displacement value of the soil-structure-damper system on soft soil.
Khatibinia et al (2016Khatibinia M., Gholami H. and Labbafi S.F. (2016). Multi-objective optimization of tuned mass dampers considering soil-structure interaction. International Journal of Optimization in Civil Engineering, pp. 595-610.) used an efficient optimization method, named multi-objective particle swarm optimization (MOPSO), which simultaneously minimizes the displacements and accelerations of each storey, to obtain optimal parameters of a TMD, bearing in mind the SSI.
Recently, Bekdas and Nigdeli (2017Bekdas & Nigdeli S. M. (2017). Metaheuristic based optimization of tuned mass dampers under earthquake excitation by considering soil-structure interaction. Soil Dynamics and Earthquake Engineering, pp. 443-461.), proposed a new optimization method of the design of a TMD considering SSI. They used two metaheuristic algorithms, harmony search algorithm (HS) and bat algorithm (BA). The algorithms are made in the time domain and consider the responses under several seismic records. The design variables were the TMD mass, period and damping ratio. Analyzed structures were single deree of freedom systems founded over different soil types, and the considered parameters were the period and damping ratio. They studied a 40 storey structure, finding that optimally tuned TMD were effective and reduced the critical displacement by up to 25%. They concluded that the methodologies proposed are both, effective and feasible, but BA has advantages in the minimization of the maximum displacement of the structure and in finding an accurate optimal value.
Lately Elias and Matsagar (2017Elias S. and Matsagar V. (2017) Effectiveness of Tuned Mass Dampers in Seismic Response Control of Isolated Bridges Including Soil-Structures Interacción, Latin American Journal of Soils and Structures, 14, pp. 2324-2341.) have studied the effectiveness of TMD to control the seismic response in isolated bridges considering SSI. They reported that the soil surrounding the pier has an important influence on the bridge displacement and the use of TMS significantly reduces the bridge dynamic response.
Other authors have studied the TMD behavior taking into account the soil-structure interaction, but considering that the TMD optimal properties are obtained to minimize any characteristic of interest of the structure response subjected to deterministic seismic excitations (seismic records). These studies have used stochastic analysis, without considering the bandwidth of the random process exciting the base of the structure. The objective of this research is to obtain the optimal parameters of a TMD to control a structure explicitely considering SSI, when it is subjected to a random process in the time domain, and to analyze the influence of the frequency content of the seismic excitation on the behavior of the TMD optimal parameters.
2 MODEL AND EQUATIONS OF MOTION
2.1 Model with TMD considering SSI
The model used in this study, shown in Figure 1, consists of a linear main structure which has a TMD attached through a spring and a damper. The main structure has stiffness, damping , mass and mass inertia .
The degree of freedom vector of the model is , where is the relative displacement of the main system with regard to the foundation, is the relative displacement ot th TMD with respect to the main structure and and are the relative displacment and rotation of the foundation, repectively. The model of the foundation is characterized by mass and mass inertia . In terms of the properties of the soil around the foundation, there is rocking damping , rocking stiffness , translational stiffness and translational damping .
Moreover, is the mass of the TMD, is the TMD stiffness, is the damping coefficient of the TMD. The height of lateral degree of freedom with respect to the foundation is , and is the white noise signal.
For the probabilitistic analysis, white noise is assumed in the rock and a double Clough-Penzien filter is considered to characterize the seismic input on the base of the model. The considered fileter is composed by two filters, the first one filters the white noise taking into account the soil layer dynamic properties, and the second filters the low frequency content. In this study, two Clough-Penzien filters were considered, one of a wide range of frequencies, named broad bandwidth (BBP) and one of a low frequencies content, called narrow bandwidth (NBP).
2.2 Equations of motion of the system with TMD considering SSI
Using the Euler-Lagrange equations (Meirovitch, 2001Meirovitch L. (2001). Fundamentals of vibrations. Mc Graw-Hill.), the equations of motion for the system under study are obteined:
These equations may be expressed in matrix form (Farshidianfar & Soheili, 2013Farshidianfar A. and Soheili S. (2013) Optimization of TMD parameters for earthquake vibrations of tall buildings including soil structure interaction. International Journal of Optimization in Civil en Engineering. 3 (3), pp 409-429.) as:
Where , and are the mass matrix, damping matrix and stiffnes matrix of the system, respectively, is the influence matrix of the input, and is the acceleration of the soil. These matrices are presented below.
3 SOIL-FOUNDATION SYSTEM
Three types of soils are considered in this study, namely soft, medium and hard. This classification is based on the shear wave velocity, as shown in Table 1. V s is the shear wave velocity; ρ is the mass density; ν the Poisson model; G is the maximum shear modulus of the soil; and is the damping ratio.
The soil behavior is considered elastic with uniform stiffnes, while the foundation is represented by a rigid disc located on the soil surface, i.e. not confined. The movement of the soil-foundation system is represented by means of two degrees of freedom, one for representing the rotation and rocking of the system, and one for the foundation horizontal movement.
The coupling of the soil and the foundation is represented by the stiffness and damping of each degree of freedom. According to the classic formulation of the circular foundation on the surface of a viscoelastic semi-space (Veletsos and Wei, 1971Veletsos A. S. and Wei Y. T. (1971). Lateral and rocking vibration of footings. Journal of Soil Mechanics and Foundations, 97(9), 1227-1248.; Veletsos and Verbic, 1973Veletsos A. S. and Verbic B. (1973). Vibration of viscoelastic foundations. Earthquake Engineering & Structural Dynamics, 2(1), 87-102.) the main equations are shown in (11) - (14).
Where: and are the horizontal and rocking stiffness of the foundation, respectively; and are the horizontal and balancing damping of the foundation; r, A and Ir are the foundation radius, area and moment of inertia of the rocking movement.
The foundation radius r, is considered as a proportion of the height h of the structural system through the aspect ratio r/h. Typically, low values represent slender systems. Likewise, the foundation mass is estimated as 10% of the mass of the structure, M1.
On the other hand, the response of the ground-foundation-structure system is characterized by its flexible base period (Veletsos and Meek, 1974Veletsos A. S. and Meek J. W. (1974). Dynamic behavior of building-foundation systems. Earthquake Engineering & Structural Dynamics, 3(2), 121-138), calculated as follows (15).
4 TIME DOMAIN PROBABILISTIC ANALYSIS
4.1 Methodology
A stochastic analysis in the time domain is made with the goal of obtaining the optimal parameters for the TMD when the studied system is excited by a random process. In the case of this investigation, a random BBP process, which represents high frequency content excitations and a random NBP process to consider low frequency content excitations, are considered.
4.2 Equations of motion in state-space formulation
The equations, in state-space formultation, for the filter are shown below, for the structure without filter and for the expanded system with the filters included. Equations (16) and (17) are the state-space equations for the structure-soil-TMD system with basal excitation . Equation (18) shows the state vector for this system without including the filter. Equations (19), (20) and (21) are the state-space equations for the Clough-Penzien double filter. Equation (22) shows the state vector of the filter where the first two elements represent the filter due to the soil stratum, and the next two terms are the filter that remove the low frequencies.
Equations (23) and (24) are the state equations of the structure with SSI and TMD, and equations (25), (26) and (27) are the state equations of the Clough-Penzien filter.
Expanding the state-space equations:
Finally, the state-space equation which governs the dynamic of the structure including the TMD, and considering SSI with the inclusion of a double filter, is given in equations (28) and (29), while equation (30) shows the state vector including the filter.
The BBP filter parameters were obtained through the adjustment by least square fitting of the Power Spectral Density Function (PSD) of an artificial seismic event derived from the Design Spectrum of the NCh 2745 Chilean Design Code, considerning soil type B. The second filter, or the low frequency content process (NBP) was defined through the paramenter adjustment to achieve a narrow bandwidth. This last filter has a predominant period of 1.23 seconds.
The expression of the Clough-Penzien filter (Clough and Penzien, 1975Clough R. W and Penzien J, (1975). Dynamics of structures. Mc Graw-Hill.) is shown in eq. (31)
Table 2 provides the parameters of the Clough-Penzien filter for both cases.
Where is the signal frecuency, and is the white noise intensity, are the frecuency and damping factor associated to the soil layer, respectively; and are the frecuency and damping factor of the high-pass filter.
4.3 Obtaining the covariance matrix
The covariance matrix was obtained by solving the Lyapunov equation (33), assuming a stationary state and also considering white noise as input. To solve the Lyapunov equation, equations (28) and (29) were employed. For the white noise intensity, it was considered that the variance of the soil's acceleration at the entrance of the system with SSI is equal to:
Where PGA is the Peak Ground Acceleration considered. In this study, a PGA of 0.3g was considered, so that the system is kept within the linear range. After applying Lyapunov equation:
Where is the covariance matrix of the complete structure-soil-TMD-filter system.
4.4 Optimization
In order to obtain the optimal TMD parameters (, ) an objective function is defined as the ratio of the standard deviations of the displacement of the system with TMD and the system without TMD. Thus the optimization problem to solve is given by:
The ranges considered for the restrictions of , were selected such the optimal solution never reaches the edge of the solution space.
5 RESULTS
5.1 Analysis of the influence of the system characteristics
5.1.1 Influence of the mass ratio
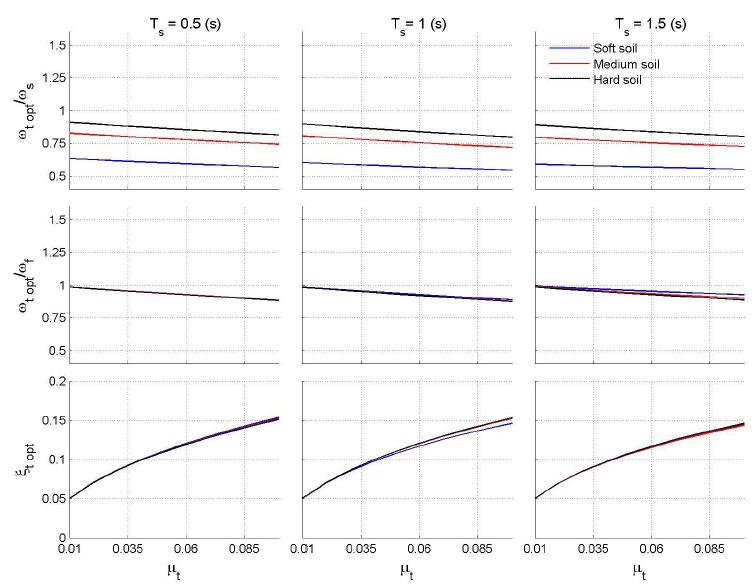
TMD mass ratio is defined as the ratio between the TMD mass and the mass of the structure. Figure 2 shows the behavior of the TMD optimal parameters with regard to the mass ratio . The first row shows the ratio between TMD optimal frequency and the system's fixed base frequency . The second row shows the ratio between TMD optimal frequency and the system's flexible base frequency (. Finally, the third row shows the TMD optimal damping factor . The behavior of these optimal parameters is analyzed for a range of mass ratios between 0.01 and 0.1, for all three soil types: soft soil, medium soil and hard soil (whose properties were defined in Table 1), and for three fixed base periods of the structure , i.e. 0.5, 1 and 1.5 seconds. Additionally, these results correspond to the case where the excitation is a random broad bandwidth process (BBP).
The values for the fixed base period were chosen due to the fact that the soil-structure interaction phenomenon is greater in short period structures.
From Figure 2, it can be observed that for all the fixed base periods, as the mass ratio increases, the TMD is gradually detuned decreasingly with regard to the fixed base frequency. It is also observed that as the soil stiffness increases, the optimal solution tends to match the fixed base optimal.
Figure 3, shows the same results that Figure 2, but for the case where the excitation is a random narrow bandwidth process (NBP). From this figure, it is seen that as the structure has a higher fixed base period, the optimal tuning ratio with regard to the fixed base frequency becomes less sensitive to the variation of the mass ratio. It is also seen that the optimal frequency ratio tends to one and for more rigid soils and more flexible structures. In the second row of the same figure, it can be observed that a perfect tuning regarding the soil flexible period is achieved, for all soil types.
On the other hand, on structures with s and s, the optimal tuning ratio in regard to the flexible base frequency is not sensitive to the soil type; however, for s, the TMD tuning ratio in regards of the flexible frequency is higher as the soil becomes softer.
In turn, for the TMD optimal damping ratio, it is seen that for broad bandwidth processes, this parameter increases for higher TMD mass ratios and is independent of the soil type. For narrow bandwidth processes, the same behavior as seen for broad bandwidth processes is observed. However, for intermediate period (s), there is a sensitivity of the optimal damping with regard to the soil type being optimal damping higher, for soft soils.
5.1.2 Influence of the aspect ratio of the structure
The influence of the structure-foundation aspect ratio (r/h) on the TMD optimal parameter is is depict in Figure 4. The distribution of the TMD optimal parameters is identical to that of Figures 2 and 3. The influence of this variable was analyzed for a range of 0.1 to 0.3 for the three soil types, as defined in Table 1 and for three fixed base periods of the structure, as considered in Figures 2 and 3. Additionally, these results correspond to the case where the excitation is a random broad bandwidth process (BBP). Similarly, Figure 5 shows the results corresponding to the broad bandwidth process (BBP) case. In both Figures, the TMD mass ratio was set to 0.02.
From Figure 4 it is observed, that for broad bandwidth processes, the higher the aspect ratio, the TMD tends to tune with the fixed base frequency of the structure and this tuning ratio is closer to one as the soil stiffness increases. On the other hand, there is no relationship between the behavior of the tuning ratio with regards to the fixed base period. It is seen that there is an almost perfect tuning for all soil types regarding the flexible base frequency, being this tuning not sensitive to the aspect ratio. Regarding the TMD damping ratio, it adopts a constant value, near to 0.07, for all aspect ratios and soil types.
In Figure 4 and Figure 5, it is seen that the behavior of the optimal TMD parameters regarding the aspect ratio is similar in both random processes, where the tunning with the flexible base frequency is observed; however, for narrow bandwidth processes, the tunning is higher when the structure is more flexible
5.1.3 Influence of the fixed base period of the structure
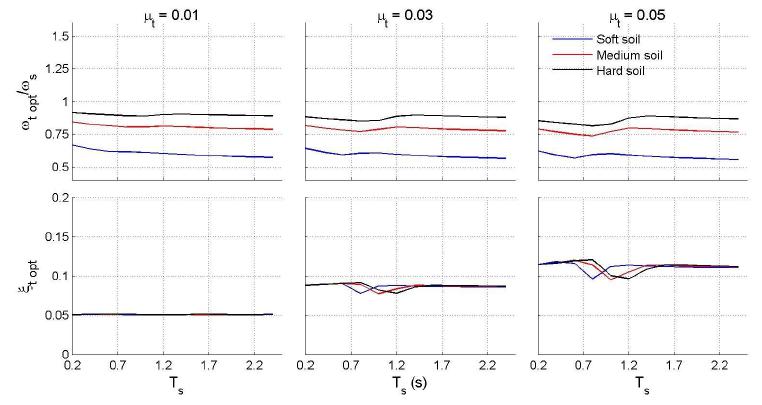
Figure 6 and Figure 7 show the behavior of the TMD optimal frequency (first row) and the optimal damping ratio (second row) against the fixed-base period of the structure. In this case, the range of the fixed base period is between 0.2 to 2.5 seconds. The results are presented for three mass ratios, (i.e. 0.01, 0.03 and 0.05) and for the case of BBP excitation (Figure 6) and NBP excitation (Figure 7).
From Figure 6, it is seen that for broad bandwidth processes, the TMD optimal frequency with regard to the fixed base frequency becomes less sensitive to the fixed base period, and is closer to one for the more rigid soil, independently of the TMD mass ratio. It is also seen that the optimal tuning ratio with regard to the main system's fixed base frequency is lower as TMD mass ratio increases. On the other hand, the TMD optimal damping does not depend on the flexibility of the main structure, and is higher as the mass ratio increases.
From Figure 7, it is seen that for narrow bandwidth processes, there is first a decreasing and later increasing of the frequency ratio with regard to the fixed base period. This happens for both cases, the optimal frequency ratio and the optimal damping ratio. It is also worth noticing that this behavior occurs around the predominant frequency of the exitation. This variation is accentuated for higher mass ratios. Regarding the TMD optimal damping ratio, it is seen that, for small TMD mass ratios, this is not sensitive to variations of the fixed base periods of the main structure.
Finally, it is also seen from Figure 7, that the average optimal damping ratio for the TMD increases as the mass ratio rises
5.1.4 Influence of the flexible base period of the structure
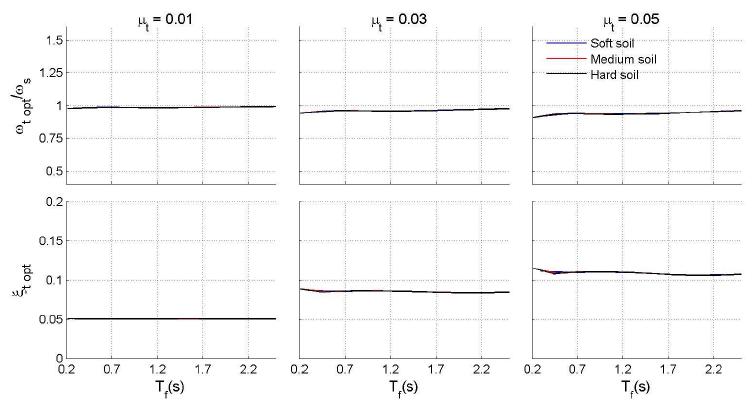
The influence of the flexible base period can be observed in Figures 8 and 9. Both figures show on the first row, the ratio between the TMD optimal frequency and the flexible base period and on the second row, the TMD optimal damping ratio, for a broad bandwidth process (Figure 8) and narrow bandwidth process (Figure 9). These optimal parameters are plotted for the three soil types considered and for three different TMD mass ratios, namely 0.01, 0.03 and 0.05.
It is seen from Figure 8 that in the case broad bandwidth process and for small mass ratios of the TMD, there is a perfect tuning between the TMD and the flexible period, for the entire range of the flexible periods and soil types. On the other hand, it is observed that for higher mass ratios, the tuning ratio is not sensitive to the flexible period and is slightly less than one. Finally, the TMD optimal damping is seen to be constant and independent of the soil type, for the entire range of flexible periods analyzed, being higher for the highest TMD mass ratios.
In Figure 9, it can be observed that the ratio between the TMD optimal frequency and flexible frequency is practically one for small mass ratios, for the entire range of flexible periods studied. Aditionally, a positive variation of the frequency ratio for flexible periods near to the dominant period of the input (Tp=1.23 sec) is observed. This variation accentuates for higher mass ratios. It is also seen that the TMD optimal damping is not sensitive to the flexible period for small mass ratios. For higher mass ratios it has a minimum which coincides with the predominant period of the excitation. Finally, the average value of the TMD optimal damping is higher for higher values of the TMD mass ratio. In both cases, the optimal frequency ratio and optimal damping ratio, is shown not to be sensitive to the soil type.
5.2 Analysis of the TMD efficiency in systems with SSI
5.2.1 Influence of the mass ratio
The influence of the mass ratio can be seen in Figure 10, wich shows the reduction of the displacement, measured as the quotient between the standard deviation of the main system displacement with an optimal TMD added, as compared to the standard deviation of the displacement of the main system without TMD. In this analysis TMD mass ratios of 0.01 to 0.1, three soil types, and three fixed base periods of the main structure are considered. On the first row the reduction for a broad bandwidth process is shown, while the second row shows the displacement reduction for a narrow bandwidth process.
From these Figure 10, it is seen that in both random processes, the TMD is more efficient for higher values of the TMD mass ratios, also seeing that in narrow broad band processes, the reduction is less sensitive to the soil type in the case of flexible structures. This result coincides with the well known fact in geothecnical engineering that the soil-structure interaction tends to be more important in short-period structures.
5.2.2 Influence of the fixed base period
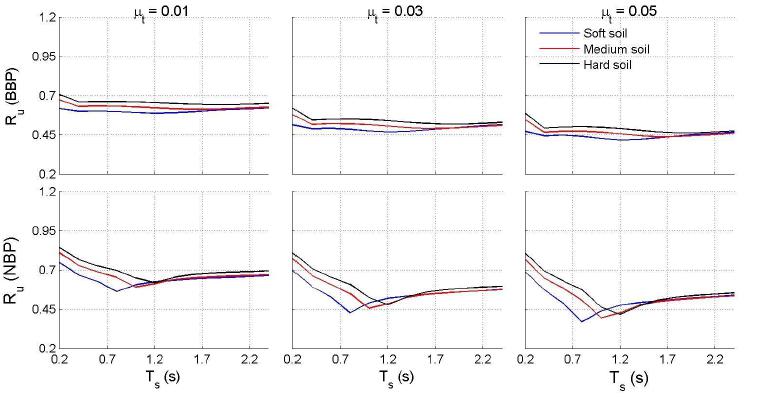
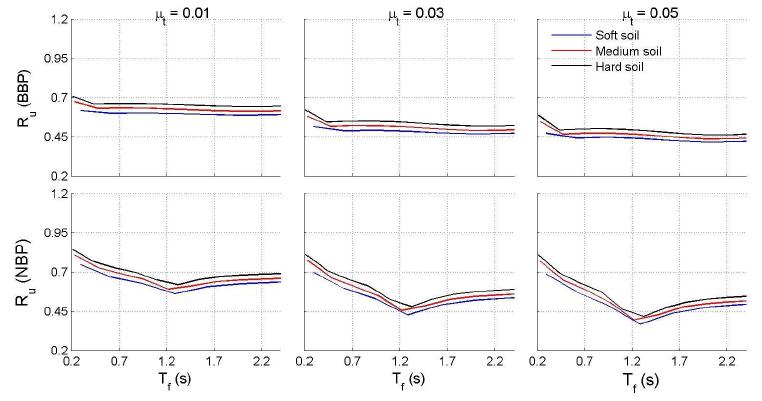
The influence of the fixed base period is shown in Figure 11. There, the reduction of the displacement, measured as the quotient between the standard deviation of the main system displacement with an optimal TMD, and the standard deviation of the displacement of the main system without TMD, is used. This figure depicts the TMD efficiency in a range of the TMD mass ratios from 0.01 to 0.1, for three soil types and three fixed base periods of the main structure. The displacement reduction for a broad bandwidth process is found on the first row, while the displacement reduction for a narrow bandwidth process is on the second row.
From this figure, it can be observed that the main system displacement reduction for a broad bandwidth process is practically not sensitive to the main structure fixed base period and is higher for higher mass ratios and soft soils. In the case of structures with small periods the reduction is sensitive to the soil type and this reduction is higher for soft soils. However, for structures with periods over 1.2 seconds, the reduction becomes not sensitive to the soil type. Aditionally a minimum is observed between 0.7 and 1.2 seconds depending of the soil type.
5.2.3 Influence of the flexible base period
The influence of the flexible base period is shown in Figure 12. In this figure the main system displacement reduction is shown as a function of the main structure flexible base period, for the three soil types. Just like in Figure 11, this analysis is performed for the three TMD mass ratios and two random procecess; a broad bandwidth (first row) and narrow bandwidth (second row).
It is seen that in the case of the broad bandwidth process, the reduction is independent of the flexible period, with the optimal TMD being more efficient in the control of the main structure for soft soils, and higher mass ratios.
For a narrow bandwidth excitation, it can be seen that the TMD efficiency is function of the soil type and the mass ratio. In particular, it can be observed that the softer the soil, the higher the efficiency, and the higher the mass ratio, the higher the efficiency.
In a more relevant note, it is observed that the maximum TMD efficiency considering explicitely the soil-structure interaction, for all soil types, and all mass ratios is achieved when the soil flexible period coincides the predominant period of the seismic excitation.
5.2.4 Influence of the aspect ratio
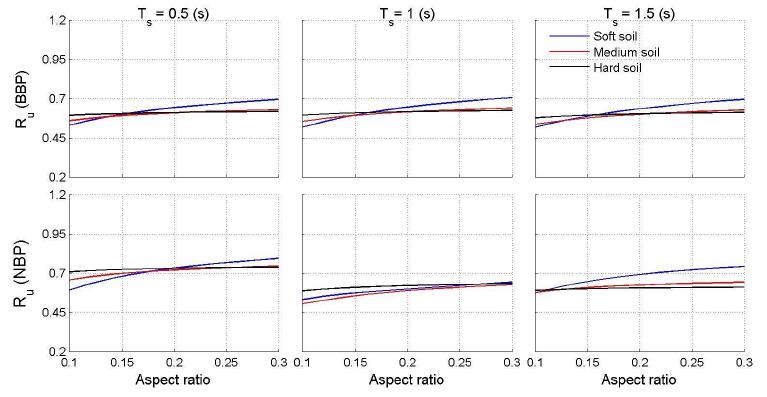
The influence of the aspect ratio is presented in Figure 13. In this figure it is shown the main system displacement reductions respect to the aspect ratio for the three soil types considered in this study. This analysis is performed for three fixed base periods of the main structure, for a broad bandwidth process (first row) and for a narrow bandwidth process (second row).
For the broad bandwidth processes, there is an aspect ratio value where the TMD efficiency changes in terms of the soil type. This value does not depend on the fixed base period of the structure and is produced at approximately 0.15. For lower values of aspect ratio (0.15), the TMD is more efficient on softer soils and for higher aspect ratio values, the TMD is more efficient on more rigid soils.
In the case of narrow bandwidth processes, the invertion point is a function of the structure flexibility. For structures with low period, this point is located in the middle of the explored range (0.2). For structures with medium periods the point is located in the upper bound of the explored range and finally, for more flexible structures the same point is located in the lower bound of the explored range.
5.3 Analysis of the response in time with an optimal TMD
The TMD behavior is analyzed from the point of view of the reduction of the displacement of a structure subjected to deterministic seismic excitation.
The displacement for the main system in the time domaine is obtained from the model shown in Figure 1, considering two seismic registries, one with high frequencies content and with the TMD optimal parameters obtained for a random broad bandwidth process; and one of low frequencies with the TMD optimal properties obtained for a random narrow bandwidth process.
5.3.1 High frequency content excitation
The seismic registry used was an artificial seismic event compatible with the Chilean Code NCh 2745 for soil type B.
Figure 14 shows the displacement of the structure main system (), subjected to the artificial seismic registry for a fixed base period of 0.5 seconds. The TMD mass ratio with regard to the main system was 0.02. The first row shows the displacement over time of the structure controlled by an optimal TMD for fixed base conditions, i.e., without including the soil interaction effect. The second, third and fourth rows correspond to the response (in this case displacement) of the main system considering the soil-structure interaction effect. Each one of these rows represent the response for soft soil, medium soil and hard soil, respectively. The red line shows the displacement response of the structure with an optimized TMD for each soil type. On the other hand, the blue line shows structure displacement response without TMD.
Table 3 gives the flexible periods of the soil-structure system used in Figures 14, 15 and 16. Table 4 gives the optimal TMD parameters employed for the estimation of the displacement response in time, of the main system in Figures 14, 15 and 16. Finally, Table 5 gives the reduction of the maximum displacement and the displacement estandar deviation of the main system for a system controlled by a TMD optimum and a system with and without TMD.
From Table 3 it can be inferred that as the soil becomes softer the flexible period of the soil-structure system period becomes larger.
On the other hand, Table 4 confirms the results shown in Figures 3 and 4, i.e. as the soil becomes more rigid, the TMD optimal tuned ratio gets closer to that observed in the case of fixed base systems controlled by TMD. It is also observed that in all cases considered and for all soil types, the optimal TMD tends to tune to the flexible period of the soil-structure system.
The previous discussion can be complemented by the fact that the optimal TMD tuned ratio is approximately constant and close to the value of 0.07 for all soil types.
Displacement of the main structure subjected to an artificial seismic event compatible with the Chilean Norm NCh 2745 for ground type B
Figure 14 confirms the results shown in Table 3 for all soil types. In particular, it is observed that there is an elongation in the flexible period for softer soils. Likewise, it is observed that for more rigid soils, the time response of the main system gets closer to the time response of the fixed base system.
Regarding the results shown in Table 5, it can be said that there is a main system response reduction, when an optimal TMD is used for control purposes. The later is true for all soil types and the fixed base system. It is also observed that the response reduction is higher for softer soils. However, the fixed base system response reduction is even bigger than the later one mentioned. From this fact, it can be inferred that ignoring the soil-structure interaction causes an over estimation of the TMD efficiency, especially for those structures with short periods excited by high frequency content events.
5.3.2 Low frequency content excitation
Considering now the case of events with low frequencies content, Figure 15 shows the displacement response of the main system subjected to the Mexico 1985 earthquake. In this seismic event the predominant period was 2.0601 seconds. The main structure considered has a fixed base period of 2.0601 seconds, therefore coinciding with the predominant period of the earthquake. The distribution of the graphs is analog to Figure 14 and the TMD and structure properties are the same.
From Figure 15 it is posibble to identify several conclusions. First, in the case of fixed base structures (first row) it is observed the resonance phenomenon, due to the tuning of the structure fixed base frequency with the predominant frequency of the earthquake This phenomenon causes excessive displacements, up to 1.1 meters. On the other hand, in the case of soft soils, there is a full uncoupling between the system flexible frequency and the predominant frequency of the seismic event. This frecuency uncoupling has associated a lower response (maximum amplitude of the response to 18 cm), discarding the resonance occurrence. From the point of view of the soil type, it can be said that for more rigid soils, the response tends to be similar to that observed in the fixed base case.
In terms of the efficiency, from Table 6 it is observed that there are response reductions for all soil types considered. It is also confirm what it was observed in the case low frecuency content event, i.e. ignoring the soil-structure interaction causes over estimation of the TMD efficiency, especially for those structures excited by low frequency content events.
Figure 16 shows the structure response subjected to the Mexico 1985 earthquake with the inclusion of a flexible base period tuned TMD. The structure fixed period is 1.243 secs.
In Table 6 response reductions are shown for the main system when the TMD is tuned with the flexible period of the soil-structure system, for all soil types. It is observed that when the TMD is tuned with the soil-structure system flexible period, and at the same time the soil flexible period matches the predominant frequency of the input, then the optimal TMD maximizes its efficiency (, )
6 CONCLUSIONS
In this study, a low-rise building model taking into account the soil-structure interactions is analyzed in order to study the influence of the frequency content of the excitation on optimal TMD parameters behahiour. Main conclusions can be summarazied as follows:
-
Regarding broad bandwidth processes:
a) As the TMD mass ratio increases, there is a reduction of the TMD tuning ratio regarding the main system fixed base frequency.
b) The ratio between the TMD optimal frequency and the structure fixed base period gets closer to one, for more rigid soils.
c) The TMD is tuned with the flexible base frequency for all the soil types, this is a known result (Ghosh and Basu, 2004Ghosh & B. Basu. (2004). Effect of soil interaction on the performance of tuned mass dampers for seismic applications. Journal of Sound and Vibration, pp. 1079-1090.), however, there is a functional relation with the mass ratio, producing perfect tuning for small mass ratios and detuning decreasingly for higher mass ratios.
d) The TMD optimal damping ratio increases as the TMD mass ratio grows and it is independent of the soil type.
e) The optimal TMD is tuned with the flexible base frequency for the whole range of aspect ratios studied, independently of the soil type and the fixed base period of the main structure.
f) The TMD optimal damping is not sensitive to the aspect ratio and takes a constant value of approximately 7%.
g) The TMD optimal frequency ratio is independent of the main structure fixed base period.
h) The TMD optimal damping is not sensitive to the main structure fixed base period and it gets higher as the mass ratio does.
i) The TMD is perfectly tuned with the flexible period of the soil-struture system for the entire range of flexible periods and soil types, for small mass ratios.
j) The TMD optimal damping is constant and independent of the soil type for the entire range of soil-structure flexible periods analyzed, being the higher for the higher TMD mass ratios.
k) The TMD is more efficient for higher values of the TMD mass ratios, and for flexible structures. The reduction becomes less sensitive to the soil type.
l) The TMD produces a greater reduction in soft soil for the entire range of fixed base periods analyzed.
m) There is an aspect ratio value where the TMD efficiency changes with regard to the soil type, independent of the soil type and the fixed base period of the structure. This is produced for an aspect ratio close to 0.15. For lower aspect ratio values, the TMD is more efficient on softer soil and for higher the opposite
n) From the deterministic analysis, it is confirmed that for a structure with 0.5 seconds fixed base period founded over every soil type, the displacement response is reduced if the structures is controlled by an optimally designed TMD considering the SSI effects. Ignoring the soil-structure interaction produces an over estimation of the TMD efficiency, especially in those structures with short periods excited by high frequency content events.
-
Regarding narrow bandwidth processes
a) The TMD is tuned with the flexible base frequency for all the soil types, this is a known result (Ghosh and Basu, 2004Ghosh & B. Basu. (2004). Effect of soil interaction on the performance of tuned mass dampers for seismic applications. Journal of Sound and Vibration, pp. 1079-1090.). However, this tuning shows a functional relationship with the TMD mass ratio, tuning perfectly for small mass ratios, and detuning as the mass ratio increases. This detuning is higher in short period structures where the ISS effect is more important.
b) The optimal TMD is tuned with the flexible base frequency for the range of aspect ratios studied, independent of the soil type and the main structure fixed base period.
c) The TMD optimal damping is not sensitive to the aspect ratio and takes a constant value of approximately 7%.
d) As the soil becomes more rigid, the TMD optimal frequency ratio gets closer to the one of rigid base structures.
e) The optimal damping of the TMD is not sensitive to the flexible period for small mass ratios, and for higher mass ratios the TMD optimal damping has a minimum value when the flexible period of the soil-structure system match the dominant period of the narrow band process.
f) The displacement reduction in flexible base structures is higher for softer soils than for hard soils. Also, for every soil stiffness the displacement reduction reaches a maximum when the flexible base structure is tuned with the dominant period of the narrow bandwidth process.
g) The optimal damping of the TMD is not sensitive to the flexible period and has a minimum value when the flexible period of the soil-structure system matches the predominant period of the seismic event.
h) The displacement reduction, considering the same mass ratio in flexible structures is not sensitive to the soil type.
i) The TMD reaches its maximum efficiency when it is tuned with the flexible period of the soil-structure system and matches the seismic event predominant period. This effect is higher on soft soils.
j) In the deterministic analysis made with the Mexico 1985 earthquake, it was confirmed that the TMD is more efficient when it tunes with the soil-structure system flexible period and the later also matches the seismic event predominant period.
7 ACKNOWLEDGEMENTS
This research has been funded by the Universidad del Bío-Bío through the DIUBB Research Project 132714 3/R. Authors would like to thank Dr. Eric Forcael for his collaboration in proff reading the manuscript
References
- Den Hartog, J. P. (1947). Mechanical Vibrations. New York: McGraw-Hill.
- Xu Y.L. and Kwok V. (1992). Wind-induced response of soil-structure-damper systems. Journal of Wind Engineering and Industrial Aerodynamics, pp. 2057-2068.
- Gao H., Samali B. and Kwok K.C.S. (1996). Structural vibration control by passive dampers considering soil-structure interaction. Proc. 2nd Int. Workshop on Structural Control, HJUST, Hong Kong, pp. 174-185.
- Wu J., Chen G. and Lou M. (1999). Seismic effectiveness of tuned mass dampers considering soil-structure interaction. Earthquake Engineering & Structural Dynamics, pp. 1219-1233.
- Ghosh & B. Basu. (2004). Effect of soil interaction on the performance of tuned mass dampers for seismic applications. Journal of Sound and Vibration, pp. 1079-1090.
- Khoshnoudian F., Ayyobi P., Paytam P. and. Mirmo'azen. M. (2015). Genetic Algorithm design of a soil-structure-damper system. Structures and Buildings, pp. 593-607.
- Khatibinia M., Gholami H. and Labbafi S.F. (2016). Multi-objective optimization of tuned mass dampers considering soil-structure interaction. International Journal of Optimization in Civil Engineering, pp. 595-610.
- Bekdas & Nigdeli S. M. (2017). Metaheuristic based optimization of tuned mass dampers under earthquake excitation by considering soil-structure interaction. Soil Dynamics and Earthquake Engineering, pp. 443-461.
- Elias S. and Matsagar V. (2017) Effectiveness of Tuned Mass Dampers in Seismic Response Control of Isolated Bridges Including Soil-Structures Interacción, Latin American Journal of Soils and Structures, 14, pp. 2324-2341.
- Meirovitch L. (2001). Fundamentals of vibrations. Mc Graw-Hill.
- Farshidianfar A. and Soheili S. (2013) Optimization of TMD parameters for earthquake vibrations of tall buildings including soil structure interaction. International Journal of Optimization in Civil en Engineering. 3 (3), pp 409-429.
- Veletsos A. S. and Wei Y. T. (1971). Lateral and rocking vibration of footings. Journal of Soil Mechanics and Foundations, 97(9), 1227-1248.
- Veletsos A. S. and Verbic B. (1973). Vibration of viscoelastic foundations. Earthquake Engineering & Structural Dynamics, 2(1), 87-102.
- Veletsos A. S. and Meek J. W. (1974). Dynamic behavior of building-foundation systems. Earthquake Engineering & Structural Dynamics, 3(2), 121-138
- Clough R. W and Penzien J, (1975). Dynamics of structures. Mc Graw-Hill.
-
Available Online: June 18, 2018
Publication Dates
-
Publication in this collection
2018
History
-
Received
26 Jan 2018 -
Reviewed
25 May 2018 -
Accepted
14 June 2018