
Abstract
The aim of this paper is to introduce a new buffering mechanism in impact reduction during assembly process of two space vehicles. Probe-cone mechanism, due to its computational easiness, is employed to study impact interaction between multibody systems. The proposed buffer with a compact structure includes a probe equipped with axial and torsional flexibilities during impact condition. Since all constraints in the problem are holonomic, the unconstrained form of Lagrangian approach will be used to derive the system’s equations of motion. The Lankarani-Nikravesh contact force model, because of its advantages in multibody systems, is applied to investigate dynamic behavior of vehicles during impact-contact event. A key factor in capture process of two vehicles is to determine the proper parameters of buffer. To do this, a strategy will be introduced to evaluate the coefficients of buffer. First, the theoretical model is solved and the obtained results are verified by those recently reported for special case related to impact analysis of two space vehicles carrying flexible probe. Second, the entire capture process will be built in MATLAB/Simulink’s SimMechanics multibody software to ascertain the correctness of theoretical model. Then, a simple ground-based experimental setup will be established to only prove the effectiveness of the proposed capturing system. The obtained results indicate that the proposed buffer leads to considerably reduce the peak value of impact force, to remarkably increase total contact time and to successfully perform capture process.
Keywords
Probe-cone capturing mechanism; Buffering system; Impact analysis; Space vehicles
1 INTRODUCTION
Nowadays, there is a growing demand to perform on-orbit servicing missions by means of miniaturized satellites due to its easy-to-install procedure and low-cost applications. Among such missions, capture process is a crucial task by which the rigid connection between two satellites can be provided. Constructing a new space structure, grasping space junk, repairing, upgrading and refueling a vehicle by another one are some topics making researchers interested in following the context of capture process. The reliable subsequent missions can be accomplished when two or more involved vehicles are able to safely fulfil the capture mission. The capture process is commonly implemented by connection between chaser as an active vehicle and target as a passive vehicle ( Fehse, 2003 Fehse, W. (2003). Automated Rendezvous and Docking of Spacecraft. Cambridge university press. ). For this, it is assumed that the chaser is gradually conducted to target with its non-zero relative velocity.
The probe-cone mechanism includes the active and passive parts mounted on flying vehicles. The active part (probe) is attached to the chaser and the passive one (cone) is connected to the target ( Bolotnik and Shmatkov, 2007 Bolotnik, N.N., Shmatkov, A.M., (2007). Control of Impact Interaction of Docking Spacecraft. Journal of Computer and Systems Sciences International 46: 628–635. ). The vertex of cone equipped with slots is regularly used to ensure complete engagement of the probe head carrying some passive spring-loaded latches ( Fehse, 2003 Fehse, W. (2003). Automated Rendezvous and Docking of Spacecraft. Cambridge university press. ). In the capture process of space vehicles, probe-cone unit is more convenient system on which one can simply install buffering device. Before making rigid connection, the impact phenomenon is inevitably occurred between two vehicles and the dynamic behavior of systems is suddenly changed. Therefore, the importance of buffer system is clearly demonstrated to attenuate shock as well as to avoid undesirable effect of impact. For this purpose, this part of review is devoted into some advantages of buffering device. In fact, buffering systems play a key role in softening the stiffness of impacting bodies ( Wang et al., 1998 Wang, W., Loh, R.N., Gu, E.Y., (1998). Passive compliance versus active compliance in robot-based automated assembly systems. Industrial Robot: An International Journal 25: 48–57. ), preventing high change of velocity over a very short time ( Fehse, 2003 Fehse, W. (2003). Automated Rendezvous and Docking of Spacecraft. Cambridge university press. ), ensuring the successful capture process ( Han et al., 2012 Han, W., Huang, Y., Chen, X., Zhang, X., (2012). Collision simulation analysis for space flexible probe-cone mechanism. Applied Mechanics and Materials 138: 111–116. ), protecting the sensitive devices probably embedded into both contacting vehicles ( Han et al., 2015 Han, W., Huang, Y., Chen, X., (2015). Research of impact dynamic modeling of flexible probe-cone docking mechanism based on Kane method. Archive of Applied Mechanics 85: 205–221. ) and reducing the peak value of impact force ( Yinan et al., 2010 Yinan, L., Ye, D., Hao, T., Dawei, Z., (2010). Design of an automatic autonomous mini probe-cone microsatellite docking mechanism. Chinese Journal of Mechanical Engineering 23: 353–360. ).
During impact, state variables are abruptly changed and therefore, the dynamic behavior of vehicles may undergo remarkable effects. The continuous contact force model in multibody systems, due to its advantages compared to instantaneous model, has been developed by many researchers. For example, a continuous contact force based on nonlinear viscous-elastic element, which considers deformation between local zone for two contacting bodies together with dissipative energy during impact, was suggested by Hunt and Crossley (1975) Hunt, K.H., Crossley, F.R.E., (1975). Coefficient of restitution interpreted as damping in vibroimpact. Journal of applied mechanics 42: 440-445. . Based on calculation of kinetic energy before and after impact, another appropriate contact force model, which is based on Hertz contact law accommodated with hysteresis damping factor, has been introduced by Lankarani and Nikravesh (1990) Lankarani, H.M., Nikravesh, P.E., (1990). A contact force model with hysteresis damping for impact analysis of multibody sytems. Journal of mechanical design 112: 369-376. . As a matter of fact, using a hysteresis damping function leads to better model the energy dissipated during impact phenomenon. The readers may consult the work ( Flores and Lankarani, 2016 Flores, P., Lankarani, H.M. (2016). Contact force models for multibody dynamics. Springer. ) for the other dissipative contact force models.
An attractive method to capture a target is to use a single-arm or multi-arm mechanisms where an n degree-of-freedom (DOF) manipulator is commonly attached to the base of servicing vehicle ( Flores-Abad et al., 2017 Flores-Abad, A., Zhang, L., Wei, Z., Ma, O., (2017). Optimal capture of a tumbling object in orbit using a space manipulator. Journal of Intelligent & Robotic Systems 86: 199-211. ; Luo et al., 2017 Luo, J., Zong, L., Wang, M., Yuan, J., (2017). Optimal capture occasion determination and trajectory generation for space robots grasping tumbling objects. Acta Astronautica 136: 380-386. ). To obtain the joint trajectories, the inverse kinematic problem was solved with assumption of zero relative velocity between end-effector and capturing position on target. Since the position and attitude of the base are significantly influenced by the motion of manipulator, Wang and Xie (2012) Wang, H., Xie, Y., (2012). Prediction error based adaptive jacobian tracking for free-floating space manipulators. IEEE Transactions on Aerospace and Electronic Systems 48: 3207-3221. demonstrated that the end-effector is not able to reach the desired pose due to unavoidable dynamic coupling between the end-effector and base. Therefore, designing a control system together with obtaining optimal configuration of a robot manipulator at the capturing moment seems to be necessary ( Xu et al., 2016 Xu, W., Peng, J., Liang, B., Mu, Z., (2016). Hybrid modeling and analysis method for dynamic coupling of space robots. IEEE Transactions on Aerospace and Electronic Systems 52: 85-98. ). Additionally, Lampariello et al. (2011) Lampariello, R., Nguyen-Tuong, D., Castellini, C., Hirzinger, G. Peters, J., (2011). Trajectory planning for optimal robot catching in real-time. IEEE International Conference on Robotics and Automation 3719-3726. showed that the long convergence time because of the required numerical iterations is the main drawback of optimizing joint trajectories in capture process.
For a wide range of complicated mechanical system, multibody dynamics model is an efficient and advantageous feature. In the concept of multibody systems, different types of kinematic joints are introduced to constrain the relative motion of each body with respect to another. As well known, the dynamic behavior of the multibody system is described by the set of second-order differential equations coupled with algebraic equations while using the form of constrained multibody dynamics ( Flores and Lankarani, 2016 Flores, P., Lankarani, H.M. (2016). Contact force models for multibody dynamics. Springer. ). This type of equations is evidently known as differential-algebraic equations (DAEs) which are computationally expensive and prone to errors ( Xu, 2014 Xu, L., (2014). A general method for impact dynamic analysis of a planar multibody system with a rolling ball bearing Joint. Nonlinear Dynamics 78: 857–879. ). A simpler type for dynamic modelling of multibody system can be unconstrained multibody model provided that we are able to eliminate all surplus generalized coordinates. In this manner, all constraint equations can be certainly written as geometric or holonomic constraints. Once the minimal set of generalized coordinates are found, the unconstrained Lagrangian approach is simply applied to derive the system’s equations of motion.
Owing to compact structure, easy-to-model procedure and computational easiness, probe-cone system has been taken into account by many authors. Besides, this system overcomes the difficulties which may arise from modelling the capture process by means of robotic manipulator reviewed above. To simplify the conventional capturing system, a flexible probe with different materials was clamped to the servicing vehicle and the role of flexibility on reduction of impact force was studied by Zhang et al. (2012 Zhang, X., Huang, Y., Han, W., Chen, X., (2012). Research of flexible beam impact dynamics based on space probe-cone docking mechanism. Advances in Space Research 49: 1053-1061. , 2013 Zhang, X., Huang, Y., Chen, X., (2013). Contact analysis of flexible beam during space docking process. Advances in Engineering Software 64: 38-46. , 2014 Zhang, X., Huang, Y., Chen, X., Han, W., (2014). Modeling of a space flexible probe–cone docking system based on the Kane method. Chinese Journal of Aeronautics 27: 248-258. , 2016 Zhang, X., Meguid, S.A., Huang, Y., Chen, X., (2016). Accurate and consistent FE modelling of soft docking of micro/nano paired-satellites using variational inequalities. International Journal of Mechanics and Materials in Design 12: 509-523. ). Numerical results indicated that the stiffer the probe is, the higher the impact force is and the shorter the total contact duration is. Referring to literature review, although the use of flexible probe may be more effective than rigid one, it can be observed that the peak value of impact force is so high that the sensing devices may undergo vibration and stress wave propagation through other subsystems. To overcome this, a new 2-DOF mechanism equipped with hydraulic-based dampers for space application will be introduced here to considerably decrease the impact force as well as remarkably increase the total contact duration.
This paper intends to propose an effective buffer based on probe-cone system in impact reduction during capture process of micro-satellites. The Lankarani-Nikravesh contact force model, accommodated with hysteresis damping function, is employed to model impact interaction between multibody systems at hand. Due to the fact that all constraints involved in the discussed problem are holonomic, the form of unconstrained Lagrangian mechanics analysis is employed to derive the corresponding equations of motion. An important factor in designing a buffering system is to obtain the buffer coefficients. For this, a new algorithm is introduced to find these proper parameters. To verify theoretical model, first, it is used available data, related to impact analysis of satellites carrying flexible probe, reported by Zhang et al. (2014) Zhang, X., Huang, Y., Chen, X., Han, W., (2014). Modeling of a space flexible probe–cone docking system based on the Kane method. Chinese Journal of Aeronautics 27: 248-258. . Second, the capture process is built in the MATLAB/Simulink’s SimMechanics environment to test correctness of dynamical model as well as the proposed algorithm. Also, with regard to a computational strategy, the dynamic behavior of satellites during and after impact will be studied. To only ascertain the effectiveness of proposed buffer in capture, a very simple experimental setup is established and also, the capture capability of buffer within an interval of for relative attitude angles between both vehicles is visualized. Numerical results indicate that the proposed mechanism is able to decrease the peak value of impact force, increase the contact duration and implement the successful capture process.
2 Proposed mechanism description
At least two satellites, named chaser and target, with a physical contact are needed to investigate capture mission. Probe-cone system is mainly composed of a probe mounted on the main body of chaser and conical surface attached to target vehicle, as illustrated in Figure 1 (a) and (b). This kind of system is used here due to its simple layout, computational easiness and effective alignment of both structures after impact. The chaser is considered to gradually approach to the conical zone installed on the target. According to Figure 1 , the capture process will be successfully executed if the tip mass of probe is able to pass through the capture area. Figure 1 (a) is given here in order to better understand how all involved components are assembled together. As can be seen in Figure 1 (a), the motion of cylinder attached to chaser is restricted by a revolute pair and also, probe can freely slide along the cylinder (translational pair) during impact. From mechanical stability point of view, it is essential to apply a torsional spring acting around the rotation axis of revolute joint. The connection between probe and cylinder is also provided by an axial shock absorber. This proposed buffering mechanism allows the equivalent impacting mass to be slowly increased instead of its rapid change during impact process.

3 Continuous impact force model
External impact is the most common type of impulsive motion and during this, the dynamic behavior of impacting multibody systems may undergo abrupt changes. In the dynamic simulation and analysis of such systems, the process of modelling contact forces plays an important role in predicting the suitable dynamic behavior of vehicles. The continuous contact force model, because of its advantages compared to discrete manner, has been used in numerous studies ( Flores and Lankarani, 2016 Flores, P., Lankarani, H.M. (2016). Contact force models for multibody dynamics. Springer. ). On the one side, a proper contact force model should be dependent upon material properties of impacting components together with geometries of both contact surfaces. On the other side, energy dissipation during impact should be considered as a function of material damping ( Lankarani and Nikravesh, 1990 Lankarani, H.M., Nikravesh, P.E., (1990). A contact force model with hysteresis damping for impact analysis of multibody sytems. Journal of mechanical design 112: 369-376. ). To do this, the Lankarni-Nikravesh contact force model, which is commonly applicable model in a wide range of multibody systems, will be applied in the problem under consideration. In the normal direction to the impact surfaces, the nonlinear Lankarani-Nikravesh contact force model for parabolic distribution of contact stress is given by Lankarani and Nikravesh (1990) Lankarani, H.M., Nikravesh, P.E., (1990). A contact force model with hysteresis damping for impact analysis of multibody sytems. Journal of mechanical design 112: 369-376. :
In which, and are the total contact stiffness and the hysteresis damping factor, respectively. and are respectively relative penetration depth and approaching velocity of two vehicles in the normal direction. Based on Figure 1 , impact occurs between the spherical tip mass of probe with radius and a plane surface on concave cone. In this condition, the contact stiffness is defined by Flores et al. (2008) Flores, P., Ambrósio, J., Claro, J.P. and Lankarani, H.M., (2008). Kinematics and dynamics of multibody systems with imperfect joints: models and case studies. Springer Science & Business Media. :
Where, and are, respectively, material properties of spherical tip mass and conical surface, given as ( Goldsmith, 1960 Goldsmith, W. (1960). Impact: the theory and physical behaviour of colliding solids, Edward Arnold, London, England. ):
Where and denote the Young’s modulus and Poisson’s ratio of two colliding bodies, respectively. Also, the hysteresis damping factor is given by Flores et al. (2008) Flores, P., Ambrósio, J., Claro, J.P. and Lankarani, H.M., (2008). Kinematics and dynamics of multibody systems with imperfect joints: models and case studies. Springer Science & Business Media. :
In above equation, and are the coefficient of restitution and initial impact velocity in the normal direction, respectively. Assuming the sliding motion along concave surface between two bodies, the friction force is considered as , where is the friction coefficient. Note that during contact, two main forces, namely normal force perpendicular to conical surface and tangential force along the cone’s wall will be simultaneously acted upon both satellites, as depicted in Figure 2 .

Based on Eq. (1), the function of intrusion should be evaluated to obtain impact force. To determine this, the distance from point A to definite line BC is measured in each time step and negative values of intrusion during solving procedure present the relative penetration depth between two bodies. As illustrated in Figure 2 , the aim of capture process is to adjust the parameters of buffer for passing the spherical tip mass through center of line BE. Keep in mind that improper set of buffer coefficients leads to rebounding motion between two vehicles and then, unsuccessful capture mission.
4 Mathematical formulation
To formulate a wide range of mechanical problem from very simple to very complex, multibody dynamics tool can be used where a collection of bodies may undergo relative motion with respect to each other. Accurate configuration of such systems is better described by arranging coordinate frames in the suitable position of each component. To provide this, all coordinates are assigned at the centroid of k-th body, as depicted in Figure 3 . It is to be noted that subscripts S, C, P and T are, respectively, associated with coordinates for servicing satellite, cylinder, probe and target. The position vectors of , , and can be easily written in the global coordinate frame, as:

As mentioned earlier, the connection between cylinder and main body of chaser is provided by revolute joint and also, the translational motion of probe with respect to cylinder is performed by prismatic joint. As well known, one can write two constraint equations for each of above pair. The description of parameters involved in the problem at hand is listed in Table 1 .
According to vector loop equation and parameters listed in Table 1 , two constraint equations for each revolute joint can be written as:
During solving procedure, the relative rotational motion between cylinder and probe should be restricted. This clearly implies that . Furthermore, the line of translation is obviously perpendicular to unit vector in each instant of time. This means that:
Where “ ” denotes inner product of two vectors. As can be concluded, there are four constraint equations in this model. To simply express the potential energy as well as dissipated energy, it is necessary to define an auxiliary vector representing the length of axial shock absorber in each time step. After some manipulations, we have:
For the system, the total kinetic energy, the potential energy and the Rayleigh dissipation function are respectively written as below:
Where, and are the mass and principal inertia moment for k-th body, respectively. Also, , and are respectively the coefficients of axial spring, torsional spring and axial damping. Note that denotes the two-norm operation and is the original length of axial spring. Since, all constraint equations are holonomic, one can obtain minimal set of coordinates and use the form of unconstrained Lagrangian approach to derive the system’s equations of motion. Eliminating the redundant generalized coordinates reduces the number of degrees-of-freedom of the system by four and then, there are only the eight independent coordinates to construct the multibody model.
Now, consider a point specified by in an arbitrary global coordinate frame, on which the impact force may be exerted in multibody system during impact. With regard to the virtual work principle, the generalized force related to coordinate can be obtained by:
The position vector for tip mass of probe in global frame is written as follows:
In which, presents the distance between tip mass of probe and revolute pair in each time step of numerical solution. Based on Figure 2 , the force vector acted on the chaser at the point of contact (point A) is simply obtained as:
Similarly, the vector of impact position together with the vector of force exerted on the target can be easily written. Because our aim is to adjust the parameters of buffer for the purpose of successful capture process, the dynamic behavior of each satellite after impact should be essentially investigated. To study this, the problem will be handled by means of two computational steps proposed here. Keeping in mind that the value of penetration depth starts with zero at the beginning of contact, the system’s equations of motion with a set of initial conditions in loaded case are firstly solved until the value of intrusion reaches again to zero. At the end of this step, contact duration and system’s state variables are determined and postulated as a new set of initial conditions for post-impact phase (i.e., equations of motion with null force vector). The flowchart of this numerical strategy for impact analysis is depicted in Figure 4 .

A key factor in buffer design is to obtain its proper coefficients. Here, it will be suggested a new strategy as a design flow to accomplish a successful capture mission between two micro-satellites. The steps of this algorithm is as follows:
-
1- Input initial conditions and material quantities of two colliding components, assume the arbitrary strokes for axial spring and torsional spring which can lead to find their coefficients in simulation.
-
2- Construct the system’s equations of motion yielded by Lagrangian approach.
-
3- Apply a numerical technique to solve equations of motion obtained in step 2 for ( is an arbitrary time). Evaluate the value of intrusion in each time step. If consider equations in loaded case . Else, reformulate equations of motion with .
-
4- Progressively do step 3 for each step time while the intrusion approaches to positive value (i.e. beginning of rebound motion).
-
5- Consider and as the strokes of axial and torsional buffer during simulation, respectively. At the end of step 4, if and , fix the values of and . Else, update these parameters based on and and do again steps 1 to 4.
-
6- Select the arbitrary parameter for to dissipate the kinetic energy during impact. Again, do steps 3 and 4 to full analysis of the problem. Calculate the total amount of energy absorbed by the axial shock absorbers by means of the load-stroke curves (i.e. the integral of its output force over displacement) and the energy lost during impact by means of the integral of impact force over penetration depth.
-
7- Evaluate the distance from tip mass of probe to the center of line BE. Once it approaches to zero, the value of has been properly set. In the case of unsuccessful capturing, it can be observed two conditions for problem. First, the value of the is so high that the much kinetic energy is dissipated and then, probe is not able to reach capture area. Second, this parameter is so small that the process encounters with high amount of kinetic energy and then, probe rebounds from cone’s wall. In both situations, the value of damping coefficient is automatically adjusted to execute successful capture mission.
5 Numerical scheme
To examine the efficiency of dynamical model, the verification is accomplished using the data available reported by Zhang et al. (2014) Zhang, X., Huang, Y., Chen, X., Han, W., (2014). Modeling of a space flexible probe–cone docking system based on the Kane method. Chinese Journal of Aeronautics 27: 248-258. regarding the impact analysis of two micro-satellites. The readers may refer to the reference literature ( Zhang et al., 2014 Zhang, X., Huang, Y., Chen, X., Han, W., (2014). Modeling of a space flexible probe–cone docking system based on the Kane method. Chinese Journal of Aeronautics 27: 248-258. ) for more details on problem description. It is to be mentioned that, in this model, the flexible probe was tightly clamped to the main body of chaser. This means that there are not any translational and rotational motions of probe with respect to chaser. Hence, it is required to build an equivalent system for the reason of verification. To make this, the coefficients of axial and torsional buffer are respectively selected as considered for stiffness of beam loaded axially and laterally in its free end. As can be seen in Figure 5 , there is a very good agreement between the computed results by the equivalent system and those yielded theoretically and experimentally in the literature. In order to test the ability of the proposed buffer in capture mission, the required constant quantities are listed in Table 2 . Both vehicles are assumed to be made of aluminum with material mass density and Poisson’s ratio equal to and , respectively. Also, the original length of axial shock absorber, the mass of cylinder and friction coefficient between tip mass and cone’s wall are respectively considered to be , and . The initial relative velocity between chaser and target is . Regarding to the user defined strokes for springs, the coefficients of axial and torsional springs have been approximately obtained in the simulation as and . In this step, the effect of axial damper is neglected and the buffer is considered to be only composed of axial and torsional springs.

The penetration depth, impact time history, the performance of axial spring and distance from point A to the center of line BE are plotted in Figure 6 . Note that the solid and dashed lines indicate the impact (loaded case) and post-impact (unloaded case) conditions, respectively. Compared to the results given by Figure 5 , the proposed buffer leads to significantly reduce impact force during collision of two micro-satellites. Based on computational strategy in Figure 4 , there is a harmonic motion for probe due to lack of energy dissipation in this case study. Although it may be observed remarkable decreasing effect in impact force without using axial damper, the residual vibratory motion of probe causes multiple impacts on the concave cone and consequently, leads to keep the sensing devices unprotected. Furthermore, the kinetic energy of the system is so much that the distance criteria has not been vanished. This clearly implies the fact that there is a rebounding motion of probe from concave surface after first impact. The trajectory of probe tip mass and cone’s wall, from initial impact to simulation time, is depicted in Figure 7 . For the reason of relative velocity, the first collision is occurred between tip mass of probe and cone’s wall and then, probe is able to slide on the surface with total contact duration of . After this time, the rebounding motion of probe is observed due to the absence of axial damper in the buffer. Note that the solid and dashed red lines indicates the trajectory of probe during contact and rebounding motion, respectively. As seen in Figure 7 , probe with its harmonic motion is collided again with the upper edge of cone’s surface and finally, the capture process is not successfully implemented. To overcome above-mentioned problems, the buffer will be equipped with an axial damper. According to algorithm presented at the end of section 4 and initial value for damping coefficient, the proper value of is obtained. The performance of buffer, distance criteria and trajectory of probe inside the concave cone are plotted in Figure 8 . As concluded from Figure 8 (c), the proper value of damping coefficient, obtained by proposed algorithm, leads to accomplish successful capture process.

Numerical results: (a) Intrusion; (b) Impact force; (c) performance of axial spring; (d) Distance criteria.
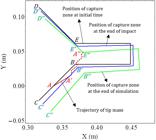

Simulation results: (a) Performance of buffer; (b) Distance criteria; (c) Trajectory of system.
To prove the correctness of the dynamical model carrying buffering system together with to obtain buffer’s coefficients based on the proposed algorithm, the entire capture mission will be built in the MATLAB/Simulink’s SimMechanics multibody analysis software. By this package, a wide variety of mechanical systems can be simply modeled and analyzed. In fact, all involved components are connected to each other by signal lines and the software is able to simulate discussed problem in the user defined time domain. As mentioned before, the Lankarani-Nikravesh contact force model has been used and constructed in this virtual environment to investigate dynamic behavior of vehicles during impact. The block diagram built in SimMechanics toolbox is shown in Figure 9 where a 3-DOF motion for each vehicle is provided by a planar joint attached to vehicle’s center of mass. For the sake of verification, the horizontal, vertical and angular velocities of chaser and target during impact process are plotted in Figure 10 . As can be seen, there is a satisfactory result between theoretical model and SimMechanics software. Also, using the dynamical model and SimMechanics package, the performance of proposed buffer is compared and depicted in Figure 11 . From initial time to the end of capture mission, the screen-shots of chaser and target are given here to better understand the role of proposed buffer in implementing successful capture operation. As observed in Figure 12 , the chaser satellite with relative velocity of approaches to the concave cone of target satellite and first impact occurs after from initial time. Due to the presence of buffer, the tip mass of probe can easily slide on the cone’s surface without rebounding motion. It is to be noted that the impact position on concave cone is intentionally assumed to be far away from the capture zone (center of line BE) to prove the efficiency of buffer. Evidently, the closer distances between impact site and capture area leads to easier and faster capture execution. The amount of dissipated energy of capturing is sufficient that the tip mass is able to reach capture zone on the target. Therefore, the effectiveness of proposed algorithm to find the buffer coefficients was ascertained by the software simulation as well as theoretical model.




It is to be mentioned that, dependent upon arbitrary strokes for axial and torsional springs considered by the user, we may obtain a wide range of proper parameters by means of a design flow for buffering systems, all of which are able to accomplish the successful capture mission. Whether the tip mass of probe can reach capture area or not depends upon the buffer coefficients used in the process. To illustrate this, capture process will be studied by some different values of buffer coefficients. Since the theoretical model has been verified by the software package, the capture process with some case studies has been simulated and analyzed only in the SimMechanics virtual environment as below:
Case 1: , and
Case 2: , and
Case 3: , and .
From initial contact to simulation time, the trajectory of probe inside the concave cone for different values of buffer coefficients are depicted in Figure 13 . As can be concluded, the improper set of buffer coefficients in case 1 leads to rebounding motion between two vehicles and finally, the capture mission cannot be successfully accomplished. A buffer system with high degree of rigidity is not suitable for assembly process and the amount of energy dissipated by axial damper is not sufficient enough to the probe to reach capture area. As observed in case 2, a buffer system with less degree of rigidity is not proper for capture mission and the amount of energy dissipated by axial damper is so high that the probe cannot reach capture area. High value of damping coefficient causes the energy of chaser cannot be sufficiently transferred to the target and therefore, the dynamic behavior of vehicles are not remarkably changed compared to case 1. In above two case studies, the buffer coefficients have not been obtained by design flow strategy presented at the end of section 4. Using the design flow strategy to find these coefficients leads to implement capture process, as depicted in case 3. Based on above three examples, it can be found that the buffer coefficients play an important role in performing capture mission. The proposed buffer mechanism together with design flow strategy allows the designers to have a wide range of their easy-to-access parameters for obtaining the buffer coefficients.

6 Simple experiment
This section is devoted into a simple and efficient ground-based experimental test to only show the performance of proposed buffer in the successful capture process. Keeping in mind that the theoretical model of capture mission has been verified by the software simulation, we have just paid our attention to establish a simple test due to limitations on data processing facilities. According to Figure 1 (a) and (b), it is reasonable to simplify this process as plane motion because of rotational symmetry in the structure of probe, cone and buffer. Therefore, three freedoms are necessary for each vehicle in plane situation. The real configuration of experimental system is pictured in Figure 14 (a). The test bench consists of a ball-wheeled chaser, a guiding motion rail, 2-DOF buffer attached to the chaser, a ball-wheeled target and string-pulley mechanism as a low-cost propelling system. Note that the guiding rail is used here to guarantee the initial relative motion of chaser in a straight line exactly similar to theoretical model. To considerably reduce the effect of surface friction as well as to simply float both vehicles on a flat surface, they have been equipped with three ball-shaped bodies by which the contact between the structures and surface remains as a point. Besides, to provide a relative approaching velocity between two vehicles, it is used the well-known string-pulley system. According to the theoretical model, probe is allowed here to have 2-DOF motion with respect to main body of chaser in the experiment (see Figure 14 (b)). Also, the detail view of target is shown in Figure 14 (c). As a matter of fact, the main purpose of this experiment is to show the efficiency of buffer in assembly process of space vehicles. The pulley and its support are connected to each other with the aid of a frictionless self-aligning bearing by which the role of string on dynamic behavior of vehicles during impact process will be minimized. After some manipulations, the initial relative velocity between chaser and target (i.e., initial impact velocity) can be determined and adjusted by a hanging mass. In this test, once the proper initial velocity of chaser at the contact point is provided, the tension of string will be zero and the behavior of system will be analyzed only with initial impact velocity. As stated before, the capture capability of proposed buffer in three relative attitude angles and between chaser and target will be investigated in experiment. Multiple snapshots of assembly process of two vehicles for relative attitude angle are depicted in Figure 15 . As can be seen, chaser vehicle equipped with 2-DOF buffer has been released from its rest position and collided with cone’s wall. In this step, the proposed buffer with capacity of impact energy dissipation avoids rebounding motion between two vehicles and tip mass of probe can freely slide on the cone’s wall and therefore, the capture process is successfully performed. To show the effectiveness of the proposed buffer, the relative attitude angles and between two vehicles have been considered in capture process, as depicted in Figures 16 and 17 , respectively. As observed, the buffer is able to dissipate adequate kinetic energy and consequently, the assembly process is easily executed without rebounding motion. In short, the proposed buffering system represents very good performance during the entire capture mission. The proposed buffer can be also used in capture process of space vehicles with remarkable difference in their masses.

Experimental setup: (a) Test platform; (b) Chaser vehicle and its buffer; (c) Target vehicle.



7 Conclusion
This paper proposed an effective buffering system based on probe-cone mechanism to reduce the peak value of impact force and to keep capture mission safe during assembly process of two micro-satellites. The Lankarani-Nikravesh contact force model was used to investigate impact interaction between our multibody system. The proposed mechanism, mounted on the servicing vehicle, included a probe equipped with axial and torsional joint flexibilities to increase total contact duration and to dissipate adequate kinetic energy of impact. With some reasonable assumptions, the impact results provided by theoretical model were compared with those theoretically and experimentally reported for a special case in the literature. A key index in designing the buffering system is to find out the proper coefficients of buffer. To do this, a new algorithm, as a design flow, was introduced to obtain these parameters. The theoretical model was formulated based on unconstrained Lagrangian approach and the design flow was verified by the virtual model built in MATLAB/Simulink’s SimMechanics multibody analysis software. Since the dynamical model of the problem under study was clearly verified by software simulation, the capability of proposed buffer in successful capture mission was taken into account in a simple experiment. Due to limitations on data measuring facilities, it was only studied the ability of buffer in a planar assembly process of two ball-wheeled vehicles, one of which was equipped with a 2-DOF buffer. The experimental test was successfully accomplished for three different relative attitude angles and between chaser and target. According to the obtained results, the proposed buffer is able to reduce impact force, to increase total contact time, to align both vehicles and to perform successful capture process.
References
- Fehse, W. (2003). Automated Rendezvous and Docking of Spacecraft. Cambridge university press.
- Bolotnik, N.N., Shmatkov, A.M., (2007). Control of Impact Interaction of Docking Spacecraft. Journal of Computer and Systems Sciences International 46: 628–635.
- Wang, W., Loh, R.N., Gu, E.Y., (1998). Passive compliance versus active compliance in robot-based automated assembly systems. Industrial Robot: An International Journal 25: 48–57.
- Han, W., Huang, Y., Chen, X., Zhang, X., (2012). Collision simulation analysis for space flexible probe-cone mechanism. Applied Mechanics and Materials 138: 111–116.
- Han, W., Huang, Y., Chen, X., (2015). Research of impact dynamic modeling of flexible probe-cone docking mechanism based on Kane method. Archive of Applied Mechanics 85: 205–221.
- Yinan, L., Ye, D., Hao, T., Dawei, Z., (2010). Design of an automatic autonomous mini probe-cone microsatellite docking mechanism. Chinese Journal of Mechanical Engineering 23: 353–360.
- Hunt, K.H., Crossley, F.R.E., (1975). Coefficient of restitution interpreted as damping in vibroimpact. Journal of applied mechanics 42: 440-445.
- Lankarani, H.M., Nikravesh, P.E., (1990). A contact force model with hysteresis damping for impact analysis of multibody sytems. Journal of mechanical design 112: 369-376.
- Flores, P., Lankarani, H.M. (2016). Contact force models for multibody dynamics. Springer.
- Flores-Abad, A., Zhang, L., Wei, Z., Ma, O., (2017). Optimal capture of a tumbling object in orbit using a space manipulator. Journal of Intelligent & Robotic Systems 86: 199-211.
- Luo, J., Zong, L., Wang, M., Yuan, J., (2017). Optimal capture occasion determination and trajectory generation for space robots grasping tumbling objects. Acta Astronautica 136: 380-386.
- Wang, H., Xie, Y., (2012). Prediction error based adaptive jacobian tracking for free-floating space manipulators. IEEE Transactions on Aerospace and Electronic Systems 48: 3207-3221.
- Xu, W., Peng, J., Liang, B., Mu, Z., (2016). Hybrid modeling and analysis method for dynamic coupling of space robots. IEEE Transactions on Aerospace and Electronic Systems 52: 85-98.
- Lampariello, R., Nguyen-Tuong, D., Castellini, C., Hirzinger, G. Peters, J., (2011). Trajectory planning for optimal robot catching in real-time. IEEE International Conference on Robotics and Automation 3719-3726.
- Xu, L., (2014). A general method for impact dynamic analysis of a planar multibody system with a rolling ball bearing Joint. Nonlinear Dynamics 78: 857–879.
- Zhang, X., Huang, Y., Han, W., Chen, X., (2012). Research of flexible beam impact dynamics based on space probe-cone docking mechanism. Advances in Space Research 49: 1053-1061.
- Zhang, X., Huang, Y., Chen, X., (2013). Contact analysis of flexible beam during space docking process. Advances in Engineering Software 64: 38-46.
- Zhang, X., Huang, Y., Chen, X., Han, W., (2014). Modeling of a space flexible probe–cone docking system based on the Kane method. Chinese Journal of Aeronautics 27: 248-258.
- Zhang, X., Meguid, S.A., Huang, Y., Chen, X., (2016). Accurate and consistent FE modelling of soft docking of micro/nano paired-satellites using variational inequalities. International Journal of Mechanics and Materials in Design 12: 509-523.
- Flores, P., Ambrósio, J., Claro, J.P. and Lankarani, H.M., (2008). Kinematics and dynamics of multibody systems with imperfect joints: models and case studies. Springer Science & Business Media.
- Goldsmith, W. (1960). Impact: the theory and physical behaviour of colliding solids, Edward Arnold, London, England.
Publication Dates
-
Publication in this collection
14 June 2018 -
Date of issue
2018
History
-
Received
27 Mar 2018 -
Reviewed
26 Apr 2018 -
Accepted
30 Apr 2018

















